
Page 310 - Machine Learning for Subsurface Characterization
P. 310
Sensors
Source
75
60
105
90
120
45
15
135
30
0
Y (mm)
Sensors
Source
60 150 150 135 120 105 80 75 60 45 30 15 0 150 135 120 105 80 75 X (mm) X (mm) Kappa = 1000 Kappa = 5 40,000 35,000 30,000 25,000 20,000 Count 15,000 10,000 5000 0 150 100 50 0 –50 –100 –150 150 100 50 0 Fracture orientation ° Fracture orientation ° Representative mate
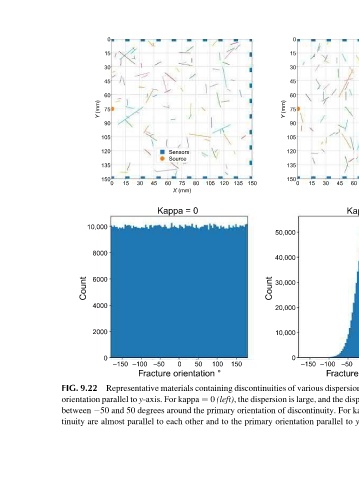
45 –50 For
–100 parallel
30
–150 of discontinuity.
15
0
0 orientation
15 30 45 60 75 90 105 120 135 150 0
50,000 40,000 30,000 20,000 10,000
Y (mm)
orientation primary
Count
150
135 150 the
120 100 primary to
105 and
80 50 other
Sensors Source 75 X (mm) Kappa = 0 0 Fracture orientation ° around the each
60
45 –50 degrees to
30 –100 parallel
15 50
–150 and
0 almost
15 30 45 60 75 90 105 120 135 150 0
0
10,000 8000 6000 4000 2000 50 are
FIG. 9.22 between tinuity
Y (mm)
Count