
Page 149 - Mechanical design of microresonators _ modeling and applications
P. 149
0-07-145538-8_CH03_148_08/30/05
Microhinges and Microcantilevers: Lumped-Parameter Modeling and Design
148 Chapter Three
5
0.5
r ω
1
0.00001 c2
c1
0.00001
0.5
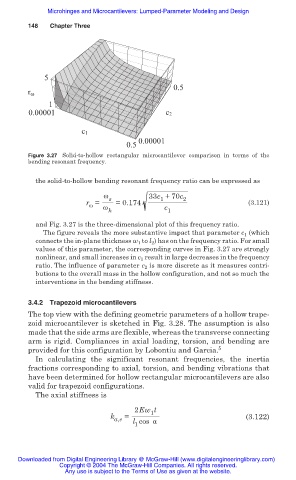
Figure 3.27 Solid-to-hollow rectangular microcantilever comparison in terms of the
bending resonant frequency.
the solid-to-hollow bending resonant frequency ratio can be expressed as
Ȧ s 33c +70c 2
1
r = Ȧ =0.174 (3.121)
Ȧ
h c 1
and Fig. 3.27 is the three-dimensional plot of this frequency ratio.
The figure reveals the more substantive impact that parameter c 1 (which
connects the in-plane thickness w 1 to l 2 ) has on the frequency ratio. For small
values of this parameter, the corresponding curves in Fig. 3.27 are strongly
nonlinear, and small increases in c 1 result in large decreases in the frequency
ratio. The influence of parameter c 2 is more discrete as it measures contri-
butions to the overall mass in the hollow configuration, and not so much the
interventions in the bending stiffness.
3.4.2 Trapezoid microcantilevers
The top view with the defining geometric parameters of a hollow trape-
zoid microcantilever is sketched in Fig. 3.28. The assumption is also
made that the side arms are flexible, whereas the transverse connecting
arm is rigid. Compliances in axial loading, torsion, and bending are
provided for this configuration by Lobontiu and Garcia. 5
In calculating the significant resonant frequencies, the inertia
fractions corresponding to axial, torsion, and bending vibrations that
have been determined for hollow rectangular microcantilevers are also
valid for trapezoid configurations.
The axial stiffness is
2Ew t
1
k = (3.122)
a,e l cos Į
1
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.