
Page 208 - Mechanics of Microelectromechanical Systems
P. 208
4. Microtransduction: actuation and sensing 195
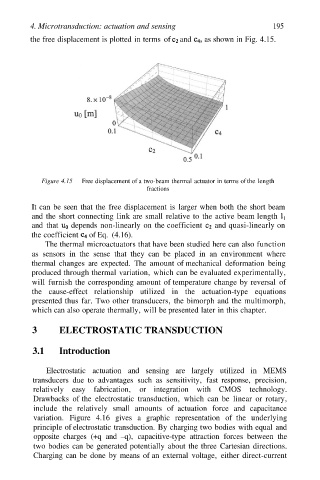
the free displacement is plotted in terms of and as shown in Fig. 4.15.
Figure 4.15 Free displacement of a two-beam thermal actuator in terms of the length
fractions
It can be seen that the free displacement is larger when both the short beam
and the short connecting link are small relative to the active beam length
and that depends non-linearly on the coefficient and quasi-linearly on
the coefficient of Eq. (4.16).
The thermal microactuators that have been studied here can also function
as sensors in the sense that they can be placed in an environment where
thermal changes are expected. The amount of mechanical deformation being
produced through thermal variation‚ which can be evaluated experimentally‚
will furnish the corresponding amount of temperature change by reversal of
the cause-effect relationship utilized in the actuation-type equations
presented thus far. Two other transducers‚ the bimorph and the multimorph‚
which can also operate thermally‚ will be presented later in this chapter.
3 ELECTROSTATIC TRANSDUCTION
3.1 Introduction
Electrostatic actuation and sensing are largely utilized in MEMS
transducers due to advantages such as sensitivity‚ fast response‚ precision‚
relatively easy fabrication‚ or integration with CMOS technology.
Drawbacks of the electrostatic transduction‚ which can be linear or rotary‚
include the relatively small amounts of actuation force and capacitance
variation. Figure 4.16 gives a graphic representation of the underlying
principle of electrostatic transduction. By charging two bodies with equal and
opposite charges (+q and –q)‚ capacitive-type attraction forces between the
two bodies can be generated potentially about the three Cartesian directions.
Charging can be done by means of an external voltage‚ either direct-current