
Page 298 - Mechanics of Microelectromechanical Systems
P. 298
5. Static response of MEMS 285
(5.45). The torsional stiffness of a circular corner-filleted microhinge is
defined in Eq. (2.121) of Chapter 2. With these particular conditions, the
solution becomes B = 0.448 T.
Figure 5.18 Electromagnetic sensor with torsional microhinges
4. MULTI-SPRING MEMS
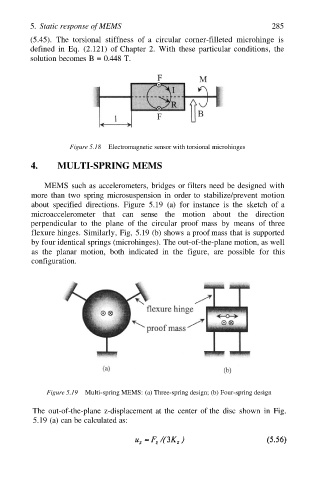
MEMS such as accelerometers, bridges or filters need be designed with
more than two spring microsuspension in order to stabilize/prevent motion
about specified directions. Figure 5.19 (a) for instance is the sketch of a
microaccelerometer that can sense the motion about the direction
perpendicular to the plane of the circular proof mass by means of three
flexure hinges. Similarly, Fig, 5.19 (b) shows a proof mass that is supported
by four identical springs (microhinges). The out-of-the-plane motion, as well
as the planar motion, both indicated in the figure, are possible for this
configuration.
Figure 5.19 Multi-spring MEMS: (a) Three-spring design; (b) Four-spring design
The out-of-the-plane z-displacement at the center of the disc shown in Fig.
5.19 (a) can be calculated as: