
Page 346 - Mechatronics for Safety, Security and Dependability in a New Era
P. 346
Ch67-I044963.fm Page 330 Tuesday, August 1, 2006 5:54 PM
Ch67-I044963.fm
330
330 Page 330 Tuesday, August 1, 2006 5:54 PM
current amplifier regulates motor current, and help to minimize the effects of induced voltage from
motor armatures. Functionality of the current amplifier is proved below. Since effects of induced
voltage, E(s), to the motor current could be approximated a linear function, the transfer function of the
current loop in Figure l(a) would be defined in Eqn. 1, and if the integrating gain, KA, is large enough,
the effects of induced voltage, E(s), could be omitted.
S (1)
K A Vis)
V(s) - E(s)
R +aK,
K A
Current T L (s ) Current T L ) (s
Current Current
T L (s ) limiter - limiter -
limiter amplifier - K C + K A + 1 1 V ) (s K C + K K A + K 1 1 1 Θ ) (s
V(s) K A + 1 I(s) 1 + - S K D + - S K B + - R a T k + J a S + - H V + - S D + - S B + - R a T k + J a S S
+ S K B + R a T k + J a S
- - E k α E k
E(s) α
α E k
G T
Current control
Current control DC Motor G T
(a) (b) (c)
(b)
(c)
(a)
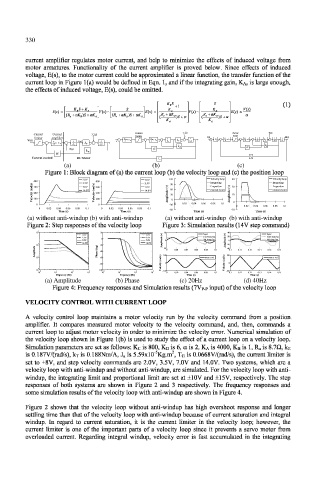
Figure 1: Block diagram of (a) the current loop (b) the velocity loop and (c) the position loop
Velocity Amp
2.0V 2.0V 120 — Velocity Am 30 Velocity Amp
400 400
) 3.5V ) 3.5V Integrating Integrating
a I " d 300 7.0V d a 300 7.0V v ( Proportion v ( 20 Proportion
s / s / ) 90 n
)
r r e 60 Current Limit e Current Limit
( 14.0V ( 14.0V
d d
y 200 y 200 2
t t 200 u u
i i t i 30 t i 10
o 2 c c l l
l e I o l p p 0 n\
e 100 100 m 0 m
V V A A
0 0 -30 0 0.02 0.04 0.06 0.08 0.1
0.04
0.02
0.08
•I 100 - 0 0.02 0.04 0.06 0.08 0.1 0
0.06
0 0.02 0.04 0.06 0.08 0.1 0 0.02 0.04 0.06 0.08 0.1 -60 -10
Time (s) s)
Time (s) Time (s) Time( -10 Time (s) )
Time( s
(b) with
(a) without anti-windup (b) with
anti-windup
anti-windup
(a) without anti-windup
(a) without anti-windup (b) with anti-windup (a) without anti-windup (b) with anti-windup
Figure 2: Step responses of the velocity loop Figure 3: Simulation results (14V step command)
3
10 20 ) 20 ) 40
2.0V 2.0V v ( Input v ( Input
20
3.5V 0 3.5V e d Cur.Limit.Out e d Cur.Limit.Out
7.0V 7.0V u t 0 Vel.Amp.Out u t 0 Vel.Amp.Out
i l i l
2 14.0V 14.0V p p
10 -20 -20
) m m
e g A A
d e -20 -40
u d
t ( 0 0.02 0.04 0.06 0.08 0.1 0.1 0.11 0.12 0.13 0.14 0.15
i l e -40
p s
m a h ) s 200 ) s 100
A 1 P / /
10 -60 d Motor Vel. d Motor Vel.
a a
r r
( (
y y
-80 t i 0 t i 0
c c
o o
0 l e l e
10 -100
0 1 2 3 0 1 2 3 V -200 V -100
10 10 10 10 10 10 10 10 0 0.02 0.04 0.06 0.08 0.1 0.1 0.11 0.12 0.13 0.14 0.15
Frquency (Hz) Frquency (Hz) Time (s) Time (s)
Frquency(Hz)
(a) Amplitude
(d)40Hz
(c) 20Hz
(b) Phase
(a) Amplitude (b) Phase (c) 20Hz (d) 40Hz
Figure 4: Frequency responses and Simulation results (7V P. P input) of the velocity loop
VELOCITY CONTROL WITH CURRENT LOOP
A velocity control loop maintains a motor velocity run by the velocity command from a position
amplifier. It compares measured motor velocity to the velocity command, and, then, commands a
current loop to adjust motor velocity in order to minimize the velocity error. Numerical simulation of
the velocity loop shown in Figure 1 (b) is used to study the effect of a current loop on a velocity loop.
Simulation parameters are set as follows: K c is 800, K D is 6, a is 2, K A is 4000, K B is 1, R a is 8.7fi, k F ,
5
2
is 0.187V/(rad/s), k T is 0.188Nm/A, J a is 5.59xl0" Kg.m , T G is 0.0668V/(rad/s), the current limiter is
set to ±8V, and step velocity commands are 2.0V, 3.5V, 7.0V and 14.0V. Two systems, which are a
velocity loop with anti-windup and without anti-windup, are simulated. For the velocity loop with anti-
windup, the integrating limit and proportional limit are set at ±10V and ±15V, respectively. The step
responses of both systems are shown in Figure 2 and 3 respectively. The frequency responses and
some simulation results of the velocity loop with anti-windup are shown in Figure 4.
Figure 2 shows that the velocity loop without anti-windup has high overshoot response and longer
settling time than that of the velocity loop with anti-windup because of current saturation and integral
windup. In regard to current saturation, it is the current limiter in the velocity loop; however, the
current limiter is one of the important parts of a velocity loop since it prevents a servo motor from
overloaded current. Regarding integral windup, velocity error is fast accumulated in the integrating