
Page 351 - Mechatronics for Safety, Security and Dependability in a New Era
P. 351
Ch68-I044963.fm Page 335 Tuesday, August 1, 2006 8:30 PM
Tuesday, August
8:30 PM
1, 2006
Page 335
Ch68-I044963.fm
335
335
40
50
.'"• -40
= lOMPa p s =10MPa
p s
/ % = 50Hz f c = 50Hz
-50 -
-100 0 +100 -100 0 + 100
O//
ut ;
(a) Without compensation ® } r °l (b) With compensation Duty I
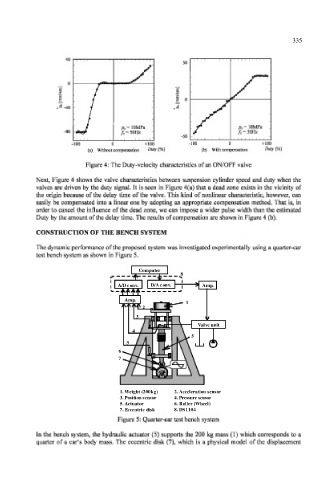
Figure 4: The Duty-velocity characteristics of an ON/OFF valve
Next, Figure 4 shows the valve characteristics between suspension cylinder speed and duty when the
valves are driven by the duty signal. It is seen in Figure 4(a) that a dead zone exists in the vicinity of
the origin because of the delay time of the valve. This kind of nonlinear characteristic, however, can
easily be compensated into a linear one by adopting an appropriate compensation method. That is, in
order to cancel the influence of the dead zone, we can impose a wider pulse width than the estimated
Duty by the amount of the delay time. The results of compensation are shown in Figure 4 (b).
CONSTRUCTION OF THE BENCH SYSTEM
The dynamic performance of the proposed system was investigated experimentally using a quarter-car
test bench system as shown in Figure 5.
Computer
Co m p u t e r
8 8
o
A/
A/D conv. . D/A conv. . Amp. .
v
v
n
o
n
Am
p
D/
D c
A c
Amp. .
p
Am
1 1
2 2
3 3
n
u
e
Va
v
l
Valve unit i t
4 4
5 5
3 3
6 6
7 7
2 2. Acceleration
0k
g)
senso
s
n
or
s
en
o
ccel
A
.
i
t
era
h
(
1. Weight (200kg)
g
W
e
i
20
1. 1. Weight t (200kg) 2. Acceleration sensor r
o
4. Pressure sensor
3 3. Position sensor
3. Position sensor 4. Pressure sensor
n
. P
ti
n
s
i
o
r
s
s
o
e
h
l
lle
e
(
c
r
t
W
o
t
e
o
r
. A
u
R
5. Actuator 6. Roller (Wheel) )
.
a
5 5. Actuator
6 6. Roller (Wheel)
7. Eccentric disk
7 7. Eccentric c d disk k 8. 8.DS1104
t
8. DS1104
D
i
s
ri
ccen
E
.
S
11
04
Figure 5: Quarter-car test bench system
Tn the bench system, the hydraulic actuator (5) supports the 200 kg mass (1) which corresponds to a
quarter of a car's body mass. The eccentric disk (7), which is a physical model of the displacement