
Page 388 - Power Electronics Handbook
P. 388
378 Power semiconductor circuit applications
motoring operation, to control the field current. The greater this current,
the larger the back e.m.f. of the motor and the more severe the braking.
After the load has been brought to a standstill, if the power is still applied,
the motor will move in the reverse direction in a normal motoring mode.
Regeneration
During regenerative braking the motor acts as a generator and the kinetic
energy of the motor and its load is recovered and may be used again.
Referring to Figure 14.24, suppose the motor is running in the forward
direction, converter 1 being on. To generate, converter 1 is turned off and
2 is turned on. If the delay angle of this converter exceeds 90" there is net
regeneration, this being a maximum for a = 180".
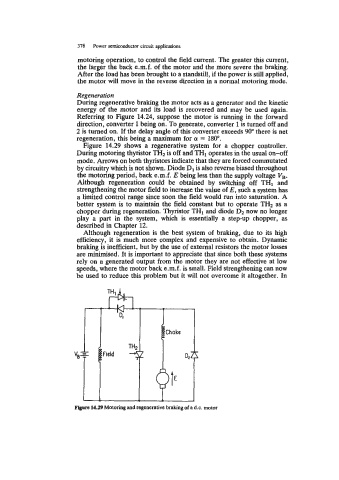
Figure 14.29 shows a regenerative system for a chopper controller.
During motoring thyristor TH2 is off and TH1 operates in the usual on-off
mode. Arrows on both thyristors indicate that they are forced commutated
by circuitry which is not shown. Diode D1 is also reverse biased throughout
the motoring period, back e.m.f. E being less than the supply voltage V,.
Although regeneration could be obtained by switching off THI and
strengthening the motor field to increase the value of E, such a system has
a limited control range since soon the field would run into saturation. A
better system is to maintain the field constant but to operate TH2 as a
chopper during regeneration. Thyristor THI and diode D2 now no longer
play a part in the system, which is essentially a step-up chopper, as
described in Chapter 12.
Although regeneration is the best system of braking, due to its high
efficiency, it is much more complex and expensive to obtain. Dynamic
braking is inefficient, but by the use of external resistors the motor losses
are minimised. It is important to appreciate that since both these systems
rely on a generated output from the motor they are not effective at low
speeds, where the motor back e.m.f. is small. Field strengthening can now
be used to reduce this problem but it will not overcome it altogether. In
Figwe 14.29 Motoring and regenerative braking of a d.c. motor