
Page 128 - Practical Control Engineering a Guide for Engineers, Managers, and Practitioners
P. 128
A New Do11ai1 and More Process Models 103
1.5 r---r---r---r---r---r---r---r----r----r------,
1
:::s 0.5
0
--O.S 0 10 20 30 40 50 60 70 80 90 100
1.5 --~-:--=-~----=--=-~-~===:::::c::==il
I-S ·-·Y
1~~~~--~--~--~---~~~-----~~~~
V) 0 I :j I: I .j j. !
~ ~ •. J::t.J:::: ~J:::LJ:[:LU:: LJ:::L
--O.S 0 10 20 30 40 50 60 70 80 90 100
Time
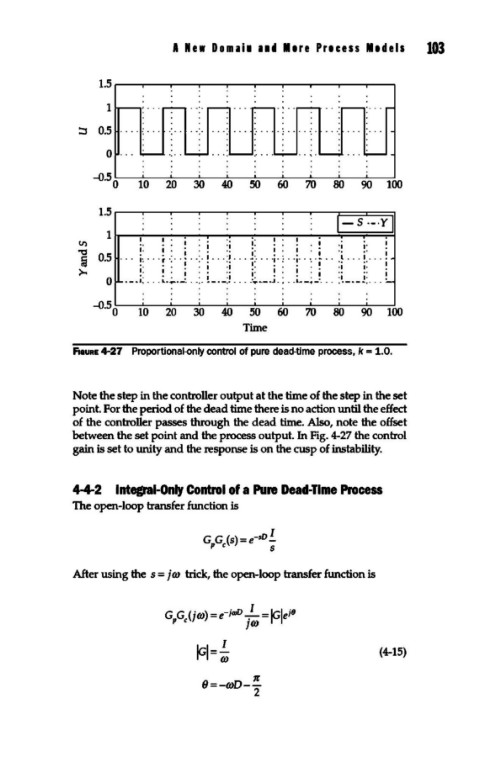
F1auRE 4-27 Proportionakmly control of pure dead-time process, k = 1.0.
Note the step in the controller output at the time of the step in the set
point. For the period of the dead time there is no action until the effect
of the controller passes through the dead time. Also, note the offset
between the set point and the process output. In Fig. 4-27 the control
gain is set to unity and the response is on the cusp of instability.
4-4-2 Integral-Only Control of a Pure Dead-Time Process
The open-loop transfer function is
G G (s)=e-sD.!.
p c s
After using the s = jro trick, the open-loop transfer function is
G G (J"ro) = e-it»D ~ = 1Giei 9
p c }(J)
(4-15)
6=-roD-!!
2