
Page 372 - Robot Builder's Bonanza
P. 372
ARM TYPES 341
work envelope does not take into consideration motion by the robot’s body, just the arm
mechanics.
The human arm has a nearly spherical work envelope. We can reach just about anything,
as long as it is within arm’s length, within the inside of about three- quarters of a sphere. Imag-
ine being inside a hollowed- out orange. You stand by one edge. When you reach out, you can
touch the inside walls of about three- quarters of the orange peel.
In a robot, such a robot arm would be said to have revolute coordinates. The three other
main robot arm designs are polar coordinate, cylindrical coordinate, and cartesian coordinate.
You’ll note that there are 3 DOF in all four basic types of arm designs. Let’s take a closer look
at each one.
REVOLUTE COORDINATE
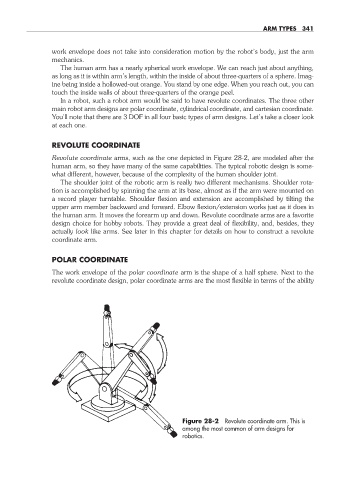
Revolute coordinate arms, such as the one depicted in Figure 28- 2, are modeled after the
human arm, so they have many of the same capabilities. The typical robotic design is some-
what different, however, because of the complexity of the human shoulder joint.
The shoulder joint of the robotic arm is really two different mechanisms. Shoulder rota-
tion is accomplished by spinning the arm at its base, almost as if the arm were mounted on
a record player turntable. Shoulder flexion and extension are accomplished by tilting the
upper arm member backward and forward. Elbow flexion/extension works just as it does in
the human arm. It moves the forearm up and down. Revolute coordinate arms are a favorite
design choice for hobby robots. They provide a great deal of flexibility, and, besides, they
actually look like arms. See later in this chapter for details on how to construct a revolute
coordinate arm.
POLAR COORDINATE
The work envelope of the polar coordinate arm is the shape of a half sphere. Next to the
revolute coordinate design, polar coordinate arms are the most flexible in terms of the ability
Figure 28- 2 Revolute coordinate arm. This is
among the most common of arm designs for
robotics.
28-chapter-28.indd 341 4/21/11 11:53 AM