
Page 374 - Robot Builder's Bonanza
P. 374
ACTUATION TECHNIQUES 343
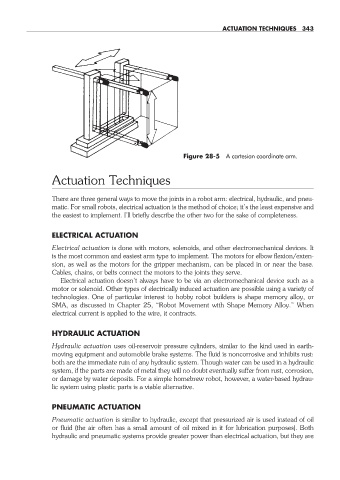
Figure 28- 5 A cartesian coordinate arm.
Actuation Techniques
There are three general ways to move the joints in a robot arm: electrical, hydraulic, and pneu-
matic. For small robots, electrical actuation is the method of choice; it’s the least expensive and
the easiest to implement. I’ll briefly describe the other two for the sake of completeness.
ELECTRICAL ACTUATION
Electrical actuation is done with motors, solenoids, and other electromechanical devices. It
is the most common and easiest arm type to implement. The motors for elbow flexion/exten-
sion, as well as the motors for the gripper mechanism, can be placed in or near the base.
Cables, chains, or belts connect the motors to the joints they serve.
Electrical actuation doesn’t always have to be via an electromechanical device such as a
motor or solenoid. Other types of electrically induced actuation are possible using a variety of
technologies. One of particular interest to hobby robot builders is shape memory alloy, or
SMA, as discussed in Chapter 25, “Robot Movement with Shape Memory Alloy.” When
electrical current is applied to the wire, it contracts.
HYDRAULIC ACTUATION
Hydraulic actuation uses oil- reservoir pressure cylinders, similar to the kind used in earth-
moving equipment and automobile brake systems. The fluid is noncorrosive and inhibits rust:
both are the immediate ruin of any hydraulic system. Though water can be used in a hydraulic
system, if the parts are made of metal they will no doubt eventually suffer from rust, corrosion,
or damage by water deposits. For a simple homebrew robot, however, a water- based hydrau-
lic system using plastic parts is a viable alternative.
PNEUMATIC ACTUATION
Pneumatic actuation is similar to hydraulic, except that pressurized air is used instead of oil
or fluid (the air often has a small amount of oil mixed in it for lubrication purposes). Both
hydraulic and pneumatic systems provide greater power than electrical actuation, but they are
28-chapter-28.indd 343 4/21/11 11:53 AM