
Page 373 - Robot Builder's Bonanza
P. 373
342 EXPERIMENTING WITH ROBOTIC ARMS
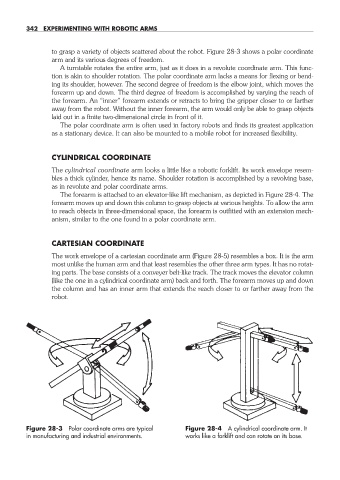
to grasp a variety of objects scattered about the robot. Figure 28- 3 shows a polar coordinate
arm and its various degrees of freedom.
A turntable rotates the entire arm, just as it does in a revolute coordinate arm. This func-
tion is akin to shoulder rotation. The polar coordinate arm lacks a means for flexing or bend-
ing its shoulder, however. The second degree of freedom is the elbow joint, which moves the
forearm up and down. The third degree of freedom is accomplished by varying the reach of
the forearm. An “inner” forearm extends or retracts to bring the gripper closer to or farther
away from the robot. Without the inner forearm, the arm would only be able to grasp objects
laid out in a finite two- dimensional circle in front of it.
The polar coordinate arm is often used in factory robots and finds its greatest application
as a stationary device. It can also be mounted to a mobile robot for increased flexibility.
CYLINDRICAL COORDINATE
The cylindrical coordinate arm looks a little like a robotic forklift. Its work envelope resem-
bles a thick cylinder, hence its name. Shoulder rotation is accomplished by a revolving base,
as in revolute and polar coordinate arms.
The forearm is attached to an elevator- like lift mechanism, as depicted in Figure 28- 4. The
forearm moves up and down this column to grasp objects at various heights. To allow the arm
to reach objects in three- dimensional space, the forearm is outfitted with an extension mech-
anism, similar to the one found in a polar coordinate arm.
CARTESIAN COORDINATE
The work envelope of a cartesian coordinate arm (Figure 28- 5) resembles a box. It is the arm
most unlike the human arm and that least resembles the other three arm types. It has no rotat-
ing parts. The base consists of a conveyer belt-like track. The track moves the elevator column
(like the one in a cylindrical coordinate arm) back and forth. The forearm moves up and down
the column and has an inner arm that extends the reach closer to or farther away from the
robot.
Figure 28- 3 Polar coordinate arms are typical Figure 28- 4 A cylindrical coordinate arm. It
in manufacturing and industrial environments. works like a forklift and can rotate on its base.
28-chapter-28.indd 342 4/21/11 11:53 AM