
Page 213 - Robot Builders Source Book - Gordon McComb
P. 213
202 Feedback Sensors
in volume. This pressure is transmitted through thin pipe 2 to pressure sensor 3 of, say,
a membrane type. The deformation of this membrane is transformed by a displace-
ment sensor into a useful signal.
3. Temperature measurements can also be made by a noncontact optical (pyrom-
eter) method based on the fact that, for an absolute black body, the radiant energy E
depends on its temperature, as follows:
where a is constant.
Measuring this energy allows estimation of the temperature of the radiating body.
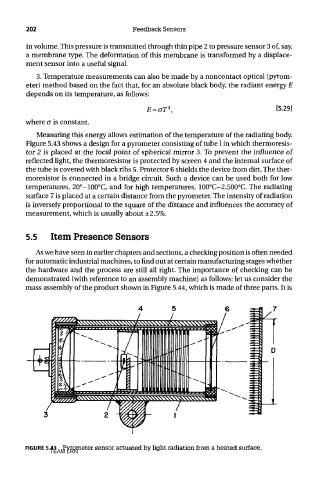
Figure 5.43 shows a design for a pyrometer consisting of tube 1 in which thermoresis-
tor 2 is placed at the focal point of spherical mirror 3. To prevent the influence of
reflected light, the thermoresistor is protected by screen 4 and the internal surface of
the tube is covered with black ribs 5. Protector 6 shields the device from dirt. The ther-
moresistor is connected in a bridge circuit. Such a device can be used both for low
temperatures, 20°-100°C, and for high temperatures, 100°C-2,500°C. The radiating
surface 7 is placed at a certain distance from the pyrometer. The intensity of radiation
is inversely proportional to the square of the distance and influences the accuracy of
measurement, which is usually about ±2.5%.
5.5 Item Presence Sensors
As we have seen in earlier chapters and sections, a checking position is often needed
for automatic industrial machines, to find out at certain manufacturing stages whether
the hardware and the process are still all right. The importance of checking can be
demonstrated (with reference to an assembly machine) as follows: let us consider the
mass assembly of the product shown in Figure 5.44, which is made of three parts. It is
FIGURE 5.43 Pyrometer sensor actuated by light radiation from a heated surface.
TEAM LRN