
Page 503 - Sensors and Control Systems in Manufacturing
P. 503
456
Ni ne
Cha p te r
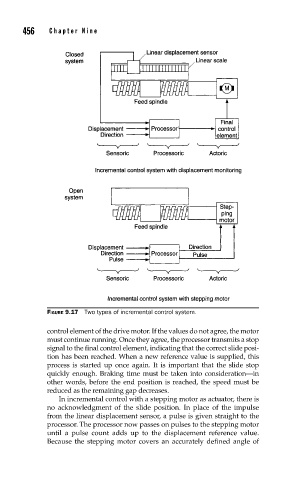
FIGURE 9.17 Two types of incremental control system.
control element of the drive motor. If the values do not agree, the motor
must continue running. Once they agree, the processor transmits a stop
signal to the final control element, indicating that the correct slide posi-
tion has been reached. When a new reference value is supplied, this
process is started up once again. It is important that the slide stop
quickly enough. Braking time must be taken into consideration—in
other words, before the end position is reached, the speed must be
reduced as the remaining gap decreases.
In incremental control with a stepping motor as actuator, there is
no acknowledgment of the slide position. In place of the impulse
from the linear displacement sensor, a pulse is given straight to the
processor. The processor now passes on pulses to the stepping motor
until a pulse count adds up to the displacement reference value.
Because the stepping motor covers an accurately defined angle of