
Page 122 - Welding Robots Technology, System Issues, and Applications
P. 122
Robotic Welding: System Issues 109
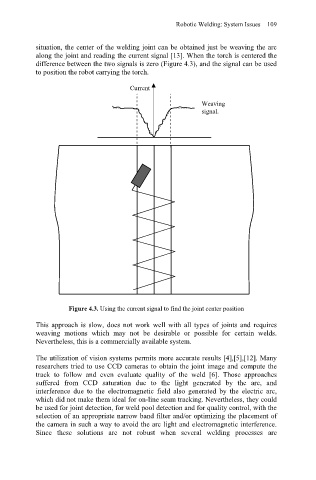
situation, the center of the welding joint can be obtained just be weaving the arc
along the joint and reading the current signal [13]. When the torch is centered the
difference between the two signals is zero (Figure 4.3), and the signal can be used
to position the robot carrying the torch.
Current
Weaving
signal.
Figure 4.3. Using the current signal to find the joint center position
This approach is slow, does not work well with all types of joints and requires
weaving motions which may not be desirable or possible for certain welds.
Nevertheless, this is a commercially available system.
The utilization of vision systems permits more accurate results [4],[5],[12]. Many
researchers tried to use CCD cameras to obtain the joint image and compute the
track to follow and even evaluate quality of the weld [6]. Those approaches
suffered from CCD saturation due to the light generated by the arc, and
interference due to the electromagnetic field also generated by the electric arc,
which did not make them ideal for on-line seam tracking. Nevertheless, they could
be used for joint detection, for weld pool detection and for quality control, with the
selection of an appropriate narrow band filter and/or optimizing the placement of
the camera in such a way to avoid the arc light and electromagnetic interference.
Since these solutions are not robust when several welding processes are