
Page 125 - Welding Robots Technology, System Issues, and Applications
P. 125
112 Welding Robots
4.2 Control of the Welding Process
To control effectively the welding process the automatic robotic system should
adapt to actual conditions, like the human welder does, and be able to move
effectively the welding torch and control the power source. Several
implementations are reported in the literature, but here the survey is post-1990
since surveys reported in the 1980s were more or less consistent in saying that few
robotic systems had adaptive capabilities, although several had seam tracking
capabilities [21].
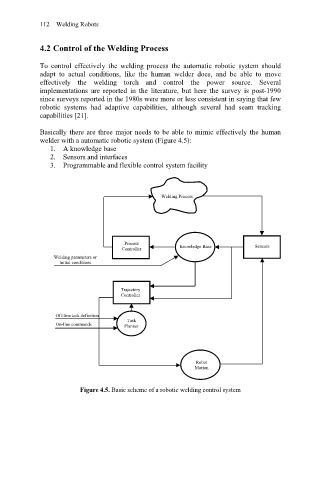
Basically there are three major needs to be able to mimic effectively the human
welder with a automatic robotic system (Figure 4.5):
1. A knowledge base
2. Sensors and interfaces
3. Programmable and flexible control system facility
Welding Process
Process
Controller Knowledge Base Sensors
Welding parameters or
Initial conditions
Trajectory
Controller
Off-line task definition
Task
On-line commands
Planner
Robot
Motion
Figure 4.5. Basic scheme of a robotic welding control system