
Page 96 - Welding Robots Technology, System Issues, and Applications
P. 96
Welding Robots
82
A laser-based seam tracker is typically mounted on the weld torch and has the weld
joint in its field of view some distance ahead in the weld path direction, see Figure
3.3. This means that the robot must use one degree of freedom to keep the sensor in
alignment with the weld joint during welding or, alternatively, use a separate
motion so that the sensor can rotate around the weld torch to maintain the
alignment relationship between the sensor and the weld torch. It should also be
noted that the seam tracking sensor must measure and deliver target positions of
the weld torch continuously and that these must be time stamped and stored in a
buffer for later use by the robot controller.
In order to use the data from the laser scanner, weld joint features must be
extracted from the image and a target position must be determined which is stored
in the input buffer to the robot controller. The feature extraction algorithm is
dependent on the weld joint to detect and is defined beforehand. Examples of
different weld joint types are shown in Figure 3.4.
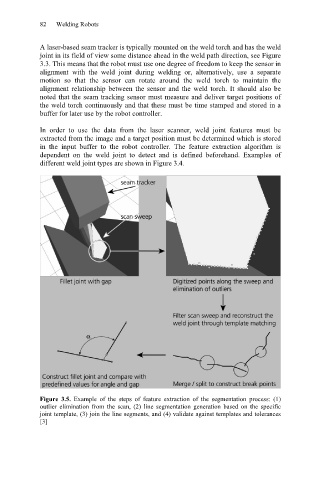
Figure 3.5. Example of the steps of feature extraction of the segmentation process: (1)
outlier elimination from the scan, (2) line segmentation generation based on the specific
joint template, (3) join the line segments, and (4) validate against templates and tolerances
[3]