
Page 282 - Adaptive Identification and Control of Uncertain Systems with Nonsmooth Dynamics
P. 282
284 Adaptive Identification and Control of Uncertain Systems with Non-smooth Dynamics
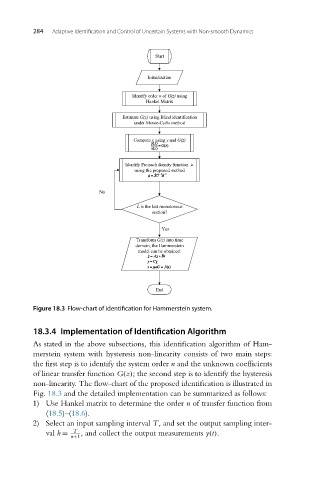
Figure 18.3 Flow-chart of identification for Hammerstein system.
18.3.4 Implementation of Identification Algorithm
As stated in the above subsections, this identification algorithm of Ham-
merstein system with hysteresis non-linearity consists of two main steps:
the first step is to identify the system order n and the unknown coefficients
of linear transfer function G(z); the second step is to identify the hysteresis
non-linearity. The flow-chart of the proposed identification is illustrated in
Fig. 18.3 and the detailed implementation can be summarized as follows:
1) Use Hankel matrix to determine the order n of transfer function from
(18.5)–(18.6).
2) Select an input sampling interval T, and set the output sampling inter-
T
val h = , and collect the output measurements y(t).
n+1