
Page 159 - Advances in Renewable Energies and Power Technologies
P. 159
132 CHAPTER 4 Performance of MPPT Techniques of Photovoltaic Systems
1
x
Ipv
Divide 1
Ppv 2
2 ×
Vpv Saturation1 Error
+ ÷
Divide1 +
– 3
+ Add – Delta Error
Memory Add3
– Memory3 Saturation
Add1
Memory1
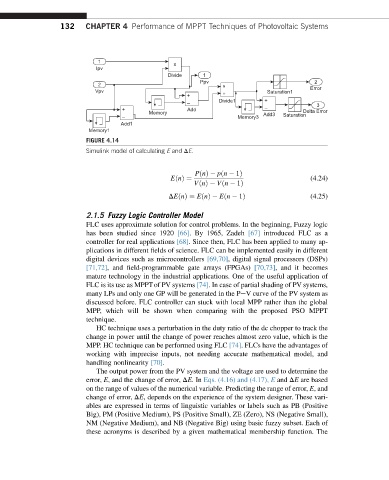
FIGURE 4.14
Simulink model of calculating E and DE.
PðnÞ pðn 1Þ
EðnÞ¼ (4.24)
VðnÞ Vðn 1Þ
DEðnÞ¼ EðnÞ Eðn 1Þ (4.25)
2.1.5 Fuzzy Logic Controller Model
FLC uses approximate solution for control problems. In the beginning, Fuzzy logic
has been studied since 1920 [66]. By 1965, Zadeh [67] introduced FLC as a
controller for real applications [68]. Since then, FLC has been applied to many ap-
plications in different fields of science. FLC can be implemented easily in different
digital devices such as microcontrollers [69,70], digital signal processors (DSPs)
[71,72], and field-programmable gate arrays (FPGAs) [70,73], and it becomes
mature technology in the industrial applications. One of the useful application of
FLC is its use as MPPTof PV systems [74]. In case of partial shading of PV systems,
many LPs and only one GP will be generated in the PeV curve of the PV system as
discussed before. FLC controller can stuck with local MPP rather than the global
MPP, which will be shown when comparing with the proposed PSO MPPT
technique.
HC technique uses a perturbation in the duty ratio of the dc chopper to track the
change in power until the change of power reaches almost zero value, which is the
MPP. HC technique can be performed using FLC [74]. FLCs have the advantages of
working with imprecise inputs, not needing accurate mathematical model, and
handling nonlinearity [70].
The output power from the PV system and the voltage are used to determine the
error, E, and the change of error, DE. In Eqs. (4.16) and (4.17), E and DE are based
on the range of values of the numerical variable. Predicting the range of error, E, and
change of error, DE, depends on the experience of the system designer. These vari-
ables are expressed in terms of linguistic variables or labels such as PB (Positive
Big), PM (Positive Medium), PS (Positive Small), ZE (Zero), NS (Negative Small),
NM (Negative Medium), and NB (Negative Big) using basic fuzzy subset. Each of
these acronyms is described by a given mathematical membership function. The