
Page 63 - CNC Robotics
P. 63
CNC Robotics
APPLICATION NOTE
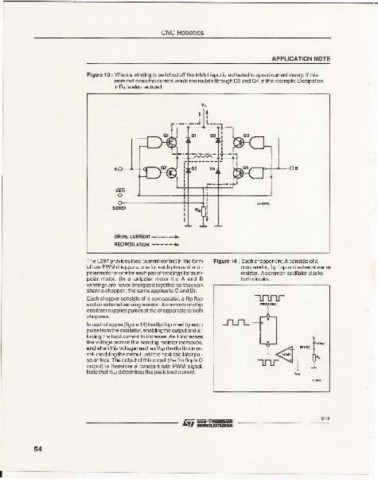
Figure 13 : When a winding is switched off the inhibit input is activated to speed current decay. If this
were not done the current would recirculate through 02 and 0 4 in this example. Dissipation
in Rs is also reduced.
v•
• ,
,
L
r ------ -
,
, 0 , , 02 D. , -.>-+---4-- 06
, I
INHi
i
0
s-s...
SENS' R. 0
0
t
DRIVE CURRENT_ . ..
RECIRCUL ATION --- --.
The L297 provides load curre nt control in th e form Figur e 14 : Each choppercircuil consists of a
of two PWM choppers,one for each phase of a bi- comparator,flip flop and external sense
polarmatoror oneforeachpairef windingsforauni- resistor. Acommon oscillatorclocks
polar motor. (In a unipolar motor the A and 8 both circuits.
wirdings are neverenergizedtogether so thaycan
share a chopper ; the same applies to Cand O).
Each chopper consists of a comparator, a flip flop
and an extemalsensingresistor. Acomrron on chip
oscillatorsuppliespulsesat the chopperrateto both
choppers.
Ineachchopper(figure 1 4) the tl~ flop isset by each
pulsefrom theoscillator, enablingtheoutputand al-
lowing the load current to increase. As it increases
the voltage across the sensing resistor increases, ' ",,0
and when this voltage reachesVref theflip flop is re- '"''
set, disablingthe output untilthe next osciilator pul-
se arrives.Theoutput of thiscircuit (the flip flop's Q '.
output) is therefore a constant rate PWM signal.
Note that Vref determines the peak load current. ....
9/18
54
r~~~~~~~~~~~~~~~~~~~~~~~~-