
Page 148 - Cam Design Handbook
P. 148
THB5 8/15/03 1:52 PM Page 136
136 CAM DESIGN HANDBOOK
C K
s s
Follower
Mass
M
Y
C f K f
Y c
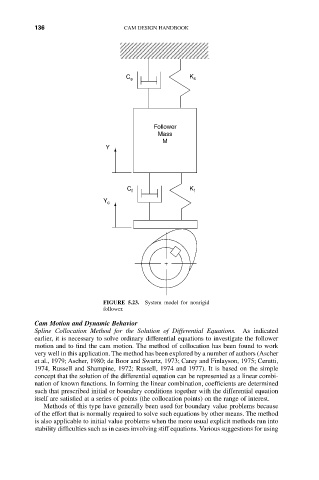
FIGURE 5.23. System model for nonrigid
follower.
Cam Motion and Dynamic Behavior
Spline Collocation Method for the Solution of Differential Equations. As indicated
earlier, it is necessary to solve ordinary differential equations to investigate the follower
motion and to find the cam motion. The method of collocation has been found to work
very well in this application. The method has been explored by a number of authors (Ascher
et al., 1979; Ascher, 1980; de Boor and Swartz, 1973; Carey and Finlayson, 1975; Cerutti,
1974, Russell and Shampine, 1972; Russell, 1974 and 1977). It is based on the simple
concept that the solution of the differential equation can be represented as a linear combi-
nation of known functions. In forming the linear combination, coefficients are determined
such that prescribed initial or boundary conditions together with the differential equation
itself are satisfied at a series of points (the collocation points) on the range of interest.
Methods of this type have generally been used for boundary value problems because
of the effort that is normally required to solve such equations by other means. The method
is also applicable to initial value problems when the more usual explicit methods run into
stability difficulties such as in cases involving stiff equations. Various suggestions for using