
Page 225 - Embedded Microprocessor Systems Real World Design
P. 225
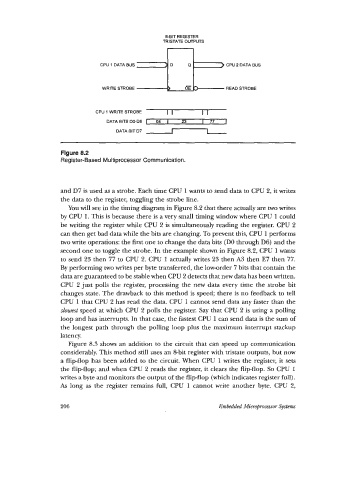
&BIT REGISTER
TRISTATE OUTPUTS
CPU 1 DATA BUS CPU 2 DATA BUS
WRITE STROBE READ STROBE
CPU 1 WRITE STROBE
DATABlTSDO-D6 I 04 I 23 I 77 1
DATABITD7 1 1
Figure 8.2
Register-Based Multiprocessor Communication.
and D7 is used as a strobe. Each time CPU 1 wants to send data to CPU 2, it writes
the data to the register, toggling the strobe line.
You will see in the timing diagram in Figure 8.2 that there actually are two writes
by CPU 1. This is because there is a very small timing window where CPU 1 could
be writing the register while CPU 2 is simultaneously reading the register. CPU 2
can then get bad data while the bits are changing. To prevent this, CPU 1 performs
two write operations: the first one to change the data bits (DO through D6) and the
second one to toggle the strobe. In the example shown in Figure 8.2, CPU 1 wants
to send 23 then 77 to CPU 2. CPU 1 actually writes 23 then A3 then E7 then 77.
By performing two writes per byte transferred, the low-order 7 bits that contain the
data are guaranteed to be stable when CPU 2 detects that new data has been written.
CPU 2 just polls the register, processing the new data every time the strobe bit
changes state. The drawback to this method is speed; there is no feedback to tell
CPU 1 that CPU 2 has read the data, CPU 1 cannot send data any faster than the
slowest speed at which CPU 2 polls the register. Say that CPU 2 is using a polling
loop and has interrupts. In that case, the fastest CPU 1 can send data is the sum of
the longest path through the polling loop plus the maximum interrupt stackup
latency.
Figure 8.3 shows an addition to the circuit that can speed up communication
considerably. This method still uses an 8-bit register with tristate outputs, but now
a flip-flop has been added to the circuit. When CPU 1 writes the register, it sets
the flip-flop; and when CPU 2 reads the register, it clears the flip-flop. So CPU 1
writes a byte and monitors the output of the flip-flop (which indicates register full).
As long as the register remains full, CPU 1 cannot write another byte. CPU 2,
206 Embedded Microprocessor Systems