
Page 394 - Fluid-Structure Interactions Slender Structure and Axial Flow (Volume 1)
P. 394
370 SLENDER STRUCTURES AND AXIAL FLOW
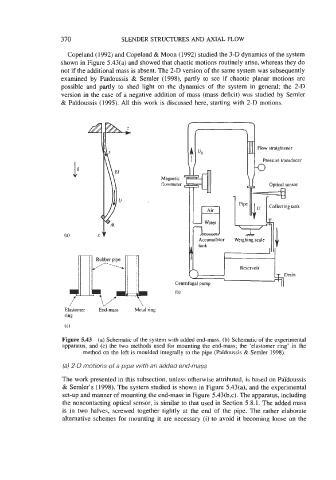
Copeland (1992) and Copeland & Moon (1992) studied the 3-D dynamics of the system
shown in Figure 5.43(a) and showed that chaotic motions routinely arise, whereas they do
not if the additional mass is absent. The 2-D version of the same system was subsequently
examined by Pdidoussis & Semler (1998), partly to see if chaotic planar motions are
possible and partly to shed light on the dynamics of the system in general; the 2-D
version in the case of a negative addition of mass (mass deficit) was studied by Semler
& Pdidoussis (1995). All this work is discussed here, starting with 2-D motions.
essure transducer
Elastomer End-mass Metal ring
ring
Figure 5.43 (a) Schematic of the system with added end-mass. (b) Schematic of the experimental
apparatus, and (c) the two methods used for mounting the end-mass; the ‘elastomer ring’ in the
method on the left is moulded integrally to the pipe (Pdidoussis & Semler 1998).
(a) 2-D motions of a pipe with an added end-mass
The work presented in this subsection, unless otherwise attributed, is based on Paidoussis
& Semler’s (1998). The system studied is shown in Figure 5.43(a), and the experimental
set-up and manner of mounting the end-mass in Figure 5.43(b,c). The apparatus, including
the noncontacting optical sensor, is similar to that used in Section 5.8.1. The added mass
is in two halves, screwed together tightly at the end of the pipe. The rather elaborate
alternative schemes for mounting it are necessary (i) to avoid it becoming loose on the