
Page 82 - Industrial Power Engineering and Applications Handbook
P. 82
Duties of induction motors 3/63
200
150
t 100
.
mE
m"
50
Tune (UT) - 0 0 002004006008 01 012 014016018 02
Tune (Vr)-
I I
(a) For C 200% (b) For 1 200%
>
1, I,
I I
Note For actual use combine curves - S 200% and I on one graph
200%
>
I, I,
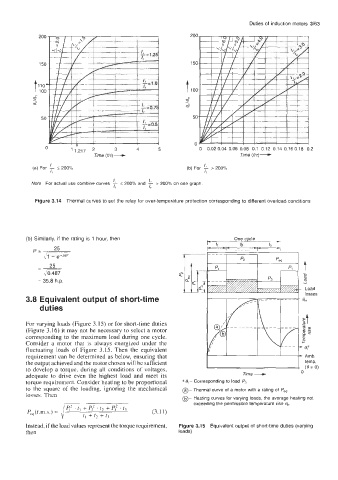
Figure 3.14 Thermal curves to set the relay for over-temperature protection corresponding to different overload conditions
(b) Similarly, if the rating is 1 hour, then
- 25 t
__-.
G0.487 5
= 35.8 h.p -1
Load
losses
3.8 Equivalent output of short-time
duties
For varying loads (Figure 3.15) or for short-time duties
(Figure 3.16) it may not be necessary to select a motor
corresponding to the maximum load during one cycle.
Consider a motor that is always energized under the 7
fluctuating loads of Figure 3.15. Then the equivalent Y---
requirement can be determined as below, ensuring that 1temp.
Fmb,
the output achieved and the motor chosen will be sufficient Time -
to develop a torque, during all conditions of voltages, 0 (e= 0)
adequate to drive even the highest load and meet its
torque requirement. Consider heating to be proportional * 6- Corresponding to load P3
to the square of the loading, ignoring the mechanical 0- Thermal curve of a motor with a rating of Peq
losses. Then
@- Heating curves for varying loads, the average heating not
P,Z . t, + Pz' ' 12 + exceeding the permissible temperature rise 0,
Peq (rms.) = . tj (3.1 1)
tl f I2 + t3
Instead, if the load values represent the torque requirement, Figure 3.15 Equivalent output of short-time duties (varying
then loads)