
Page 178 - MEMS Mechanical Sensors
P. 178
7.8 Tactile Sensors 167
Figure 7.17 Schematic diagram of a single taxel. (From: [69]. © 2003 IOP Publishing Ltd.
Reprinted with permission.)
A5 × 5 silicon micromachined tactile sensor array for the detection of
extremely small force (micro-Newton range) has also been demonstrated recently
[70]. The central contacting pads are trampoline-shaped suspended structures with
a piezoresistive layer of polysilicon embedded in each of the four sensor beams to
detect the displacement of the suspended contacting pad. Each square tactile has
dimension of 200 × 200 µm with 250-µm center-to-center spacing. The entire
sensor area is 1.25 × 1.25 mm. Each of the sensor beams has dimension 90 µm long
and 10 µm wide, while the central square contacting plate is 40 × 40 µm. Linear
sensitivity of the 10-kΩ sensors is about 0.02 mV/µN at the output of a Wheatstone
bridge with a single sensor and 10-V excitation.
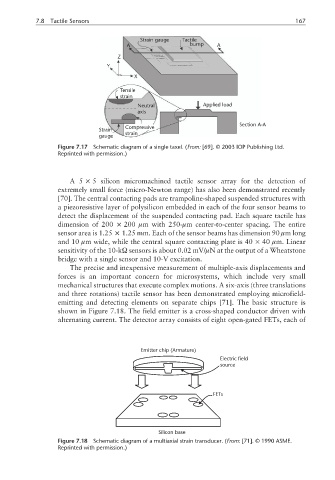
The precise and inexpensive measurement of multiple-axis displacements and
forces is an important concern for microsystems, which include very small
mechanical structures that execute complex motions. A six-axis (three translations
and three rotations) tactile sensor has been demonstrated employing microfield-
emitting and detecting elements on separate chips [71]. The basic structure is
shown in Figure 7.18. The field emitter is a cross-shaped conductor driven with
alternating current. The detector array consists of eight open-gated FETs, each of
Emitter chip (Armature)
Electric field
source
FETs
Silicon base
Figure 7.18 Schematic diagram of a multiaxial strain transducer. (From: [71]. © 1990 ASME.
Reprinted with permission.)