
Page 191 - MEMS Mechanical Sensors
P. 191
180 Inertial Sensors
f s
Digital
1 bitstream
S/H C(z)
0
Pick-off Compensator Comparator V out
V f
V f
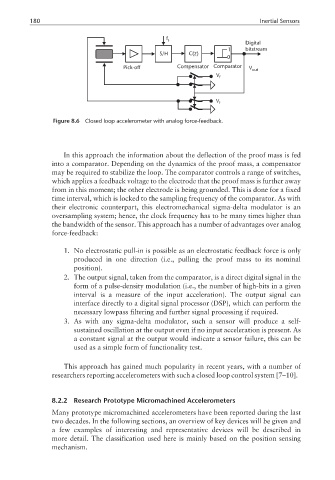
Figure 8.6 Closed loop accelerometer with analog force-feedback.
In this approach the information about the deflection of the proof mass is fed
into a comparator. Depending on the dynamics of the proof mass, a compensator
may be required to stabilize the loop. The comparator controls a range of switches,
which applies a feedback voltage to the electrode that the proof mass is further away
from in this moment; the other electrode is being grounded. This is done for a fixed
time interval, which is locked to the sampling frequency of the comparator. As with
their electronic counterpart, this electromechanical sigma-delta modulator is an
oversampling system; hence, the clock frequency has to be many times higher than
the bandwidth of the sensor. This approach has a number of advantages over analog
force-feedback:
1. No electrostatic pull-in is possible as an electrostatic feedback force is only
produced in one direction (i.e., pulling the proof mass to its nominal
position).
2. The output signal, taken from the comparator, is a direct digital signal in the
form of a pulse-density modulation (i.e., the number of high-bits in a given
interval is a measure of the input acceleration). The output signal can
interface directly to a digital signal processor (DSP), which can perform the
necessary lowpass filtering and further signal processing if required.
3. As with any sigma-delta modulator, such a sensor will produce a self-
sustained oscillation at the output even if no input acceleration is present. As
a constant signal at the output would indicate a sensor failure, this can be
used as a simple form of functionality test.
This approach has gained much popularity in recent years, with a number of
researchers reporting accelerometers with such a closed loop control system [7–10].
8.2.2 Research Prototype Micromachined Accelerometers
Many prototype micromachined accelerometers have been reported during the last
two decades. In the following sections, an overview of key devices will be given and
a few examples of interesting and representative devices will be described in
more detail. The classification used here is mainly based on the position sensing
mechanism.