
Page 261 - Mechanical design of microresonators _ modeling and applications
P. 261
0-07-145538-8_CH05_260_08/30/05
Resonant Micromechanical Systems
260 Chapter Five
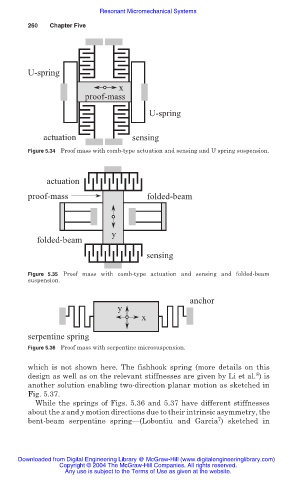
U-spring
x
proof-mass
U-spring
actuation sensing
Figure 5.34 Proof mass with comb-type actuation and sensing and U spring suspension.
actuation
proof-mass folded-beam
y
folded-beam
sensing
Figure 5.35 Proof mass with comb-type actuation and sensing and folded-beam
suspension.
anchor
y
x
serpentine spring
Figure 5.36 Proof mass with serpentine microsuspension.
which is not shown here. The fishhook spring (more details on this
8
design as well as on the relevant stiffnesses are given by Li et al. ) is
another solution enabling two-direction planar motion as sketched in
Fig. 5.37.
While the springs of Figs. 5.36 and 5.37 have different stiffnesses
about the x and y motion directions due to their intrinsic asymmetry, the
7
bent-beam serpentine spring—(Lobontiu and Garcia ) sketched in
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.