
Page 86 - Mechatronic Systems Modelling and Simulation with HDLs
P. 86
4.5 MODELLING PARADIGMS 75
operational amplifiers, comparators, etc. Such macro-models describe behaviour
at the terminals, for example, in the form of a characteristic. Finally, we can
also model components such as transistors, diodes, etc. using analogue hardware
description languages.
Furthermore, the methodology of analogue modelling is in line with the follow-
ing strategies:
Structural definition Analogue hardware description languages permit the formu-
lation of a component as an interconnection of its subcomponents.
Behavioural definition The description of the terminal behaviour of components
on the basis of mathematical equations is one of the main properties of analogue
hardware description languages.
Conservative modelling Analogue hardware description languages permit the for-
mulation of models on the basis of potential (across) and flow (through) variables,
e.g. voltage and current or velocity and force, meaning that Kirchhoff’s laws apply.
The product of potential and flow variables is normally represented by energy. So
this formulation is set up to describe energy flows.
Non-conservative modelling Non-conservative quantities can also be described,
allowing block or signal flow diagrams to be formulated using hardware description
languages. Often the description of an information or control flow predominates.
Table model Table models are normally based upon a piece-wise linear descrip-
tion, which may be smoothed for numerical reasons. These models can also be
unproblematically formulated into an analogue hardware description language.
Arbitrary mixed forms Analogue hardware description languages permit the use
of arbitrary mixed forms of these modelling strategies.
Using the above-mentioned modelling strategies, analogue hardware description
languages thus permit the formulation of structural, physical and experimental
models, so that the fundamental approaches to modelling from Chapter 2 are fully
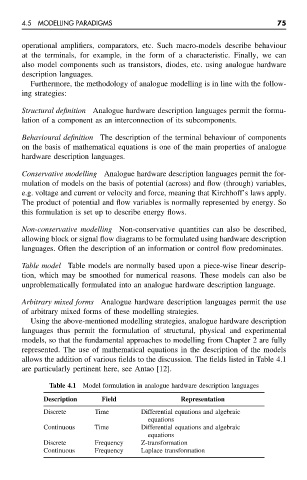
represented. The use of mathematical equations in the description of the models
allows the addition of various fields to the discussion. The fields listed in Table 4.1
are particularly pertinent here, see Antao [12].
Table 4.1 Model formulation in analogue hardware description languages
Description Field Representation
Discrete Time Differential equations and algebraic
equations
Continuous Time Differential equations and algebraic
equations
Discrete Frequency Z-transformation
Continuous Frequency Laplace transformation