
Page 131 - Modern Control Systems
P. 131
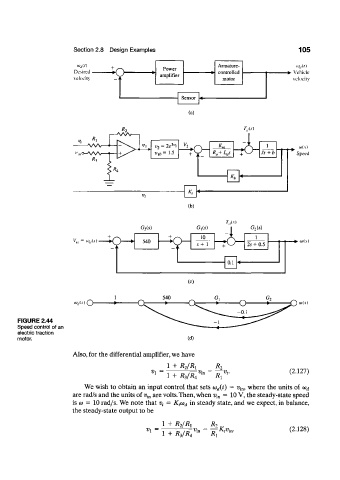
Section 2.8 Design Examples 105
<o,,U) Armature- (0,,(t)
Pe- ired . "tn Power controlled t \'chiclc
velocity amplifier motor velocity
(a)
TAs)
w(v)
Speed
(b)
7".;(v)
V,„ = w,,(.v> * Q » t » w(.v)
(c)
«,/<*> O (0(.1)
FIGURE 2.44
Speed control of an
electric traction
motor. (d)
Also, for the differential amplifier, we have
1 + R 2/R x R 2
Vl = V (2.127)
1 + R 3/R 4^ ~ R~ t >-
We wish to obtain an input control that sets o) d(t) = v in, where the units of o) d
= 10 V, the steady-state speed
are rad/s and the units of v in are volts. Then, when v m
is ft> = 10 rad/s. We note that v t = K t(i) d in steady state, and we expect, in balance,
the steady-state output to be
1 + Ri/Ri Ri v
(2.128)