
Page 164 - Modern Control Systems
P. 164
138 Chapter 2 Mathematical Models of Systems
E2.13 Consider the feedback system in Figure E2.13. Com-
- = 0 6 *
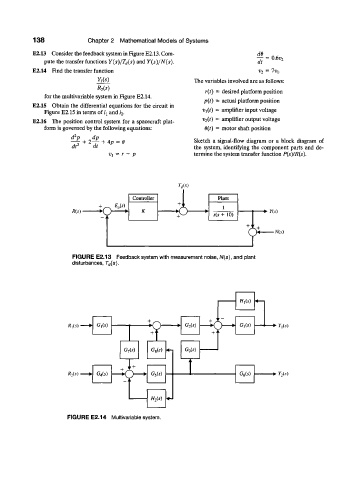
pute the transfer functions Y(s)/T d(s) and Y(s)/N(s).
E2.14 Find the transfer function V 2 = lV\.
Yj(s) The variables involved are as follows:
R 2(s)
r(t) = desired platform position
for the multivariate system in Figure E2.14.
p{t) = actual platform position
E2.15 Obtain the differential equations for the circuit in
Figure E2.15 in terms of ^ and i 2. V\{l) = amplifier input voltage
v 2(t) = amplifier output voltage
E2.16 The position control system for a spacecraft plat-
form is governed by the following equations: 0(/) = motor shaft position
2
d p dp
2
—f + -p + 4p = B Sketch a signal-flow diagram or a block diagram of
dt 2 dt the system, identifying the component parts and de-
Vi=r- p termine the system transfer function P(s)/R(s).
W
Ms)
FIGURE E2.13 Feedback system with measurement noise, A/(s), and plant
disturbances, T d(s).
Hl(5)
+ r~\ +x~
«.(*) Gfr) v G 2(s) Gjlis) "• W
+ + 1 k
G 7(s) G%(s) G 9{s)
i k
R 2(s) G 4{s) -iF— G 5{s) G b{s) • Ki(.V)
k
H 2(s)
FIGURE E2.14 Multivariate system.