
Page 302 - Modern Control Systems
P. 302
276 Chapter 4 Feedback Control System Characteristics
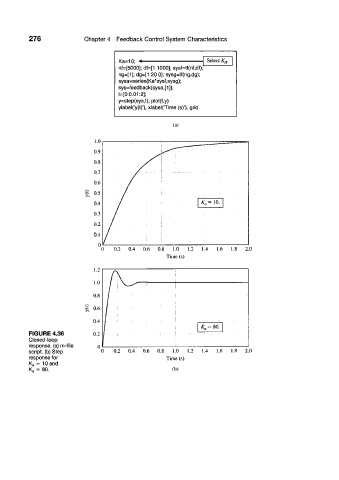
Ka=10; * Select K a.
nf=[5000]; df=[1 1000]; sysf=tf(nf,df);
ng=[1]; dg=[1 20 0]; sysg=tf(ng,dg);
sysa=series(Ka*sysf,sysg);
sys=feedback(sysa,[1]);
t=[0:0.01:2];
y=step(sys,t); plot(t.y)
ylabel('y{t)'), xlabel(Time (s)'), grid
(a)
1.0
.i*----r*"
0.9
0.8
0.7
/
0.6 -
S 0.5
0.4 ^ = 1 0 .
0.3
0.2 !
1
0.1 j
1 ' '
0
0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0
Time (s)
1.2
1.0 A '
0.4 l" :
0.8
f
2 0.6
J K tt = 80.
FIGURE 4.36 0.2 r
Closed-loop f " "
response, (a) m-file 0
script, (b) Step 0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0
response for Time (s)
= 10 and
K a
K„ = 80. (b)