
Page 301 - Modern Control Systems
P. 301
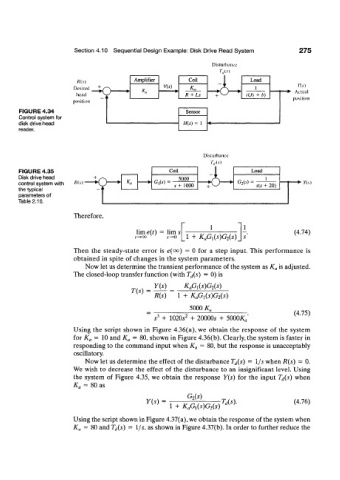
Section 4.10 Sequential Design Example: Disk Drive Read System 275
Disturbance
7",,(.v)
/f(.v) Amplifier Coil Load
Desired + "^ , V(s) K(.v)
head ^O Ka R + Ls s(Js + b) - • Actual
position position
FIGURE 4.34 Sensor
Control system for
disk drive head H(s) = 1
reader.
Disturbance
FIGURE 4.35 Coil Load
Disk drive head 5000
control system with Ms) G,(.v) * + 1000 G 2 (.v) = s(s + 20) • • Yis)
the typical
parameters of
Table 2.10.
Therefore,
1
lim e{t) = lim s (4.74)
1 + K&isMs)
Then the steady-state error is e(oo) = 0 for a step input. This performance is
obtained in spite of changes in the system parameters.
Now let us determine the transient performance of the system as K a is adjusted.
The closed-loop transfer function (with T d{s) = 0) is
Y(s) K&isMs)
T(s) =
R(s) 1 + K&WGiis)
5000 K„
(4.75)
s J + 1020^ 2 + 20000* + 5000/C
Using the script shown in Figure 4.36(a), we obtain the response of the system
for K a = 10 and K a = 80, shown in Figure 4.36(b). Clearly, the system is faster in
responding to the command input when K a = 80, but the response is unacceptably
oscillatory.
Now let us determine the effect of the disturbance T d(s) = 1/s when R(s) = 0.
We wish to decrease the effect of the disturbance to an insignificant level. Using
the system of Figure 4.35, we obtain the response Y(s) for the input T d(s) when
K„ = 80 as
G 2(s)
Y(s) = U')- (4.76)
1 + K aG x(s)G 2(s)
Using the script shown in Figure 4.37(a), we obtain the response of the system when
K a = 80 and T d(s) = 1/j, as shown in Figure 4.37(b). In order to further reduce the