
Page 349 - Modern Control Systems
P. 349
Section 5.6 The Steady-State Error of Feedback Control Systems 323
tf(.v) O — • •
(a)
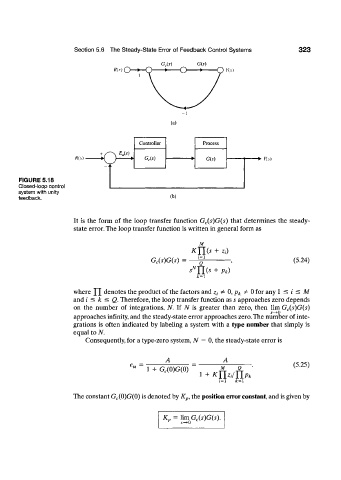
Controller Process
"^ E a(s)
«(.0 G c{s) 0(5) • n.s)
L
FIGURE 5.18
Closed-loop control
system with unity
feedback. (b)
It is the form of the loop transfer function G c(s)G(s) that determines the steady-
state error. The loop transfer function is written in general form as
M
Kl[{s + zd
G c(s)G(s) = —f , (5.24)
^ri(* + Pk)
A- = l
where Y\. denotes the product of the factors and n ^ 0, p k # 0 for any 1 < / < M
and i < k ^ Q. Therefore, the loop transfer function as s approaches zero depends
on the number of integrations, N. If N is greater than zero, then lim G c(s)G(s)
approaches infinity, and the steady-state error approaches zero. The number of inte-
grations is often indicated by labeling a system with a type number that simply is
equal to N.
Consequently, for a type-zero system, TV = 0, the steady-state error is
(5.25)
C-cc
1 + G c(0)G(0) u Q •
l + #11*//UP*
/=1 k = l
The constant G c(0)G(0) is denoted by K„, the position error constant, and is given by
K p = lim G C (J)G(J).
s—»0