
Page 163 - Practical Control Engineering a Guide for Engineers, Managers, and Practitioners
P. 163
138 Chapter Five
1.4 r-----r-~-~~----r--~-r---;:::::t:=::::::J::::::==::::;-J
1.2
1
"'0 0.8 ·.
; 0.6
V) 0.4
0.2 : ;
00 50 100 150 200 250 300 350 400 450 500
~: ~~ (\. ; .... ·> . . . ·.
o.1 t . ·V-· -.--.---------------i
:::s 0.08
0.06
0.04
0.02
0
0 50 100 150 200 250 300 350 400 450 500
Tune
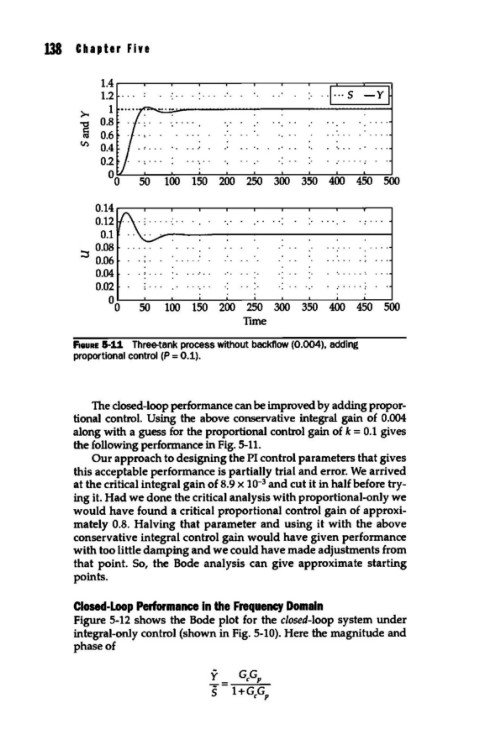
F•auRE 5·11 Thre~tank process without backflow (0.004), adding
proportional control (P = 0.1).
The closed-loop performance can be improved by adding propor-
tional control. Using the above conservative integral gain of 0.004
along with a guess for the proportional control gain of k = 0.1 gives
the following performance in Fig. 5-11.
Our approach to designing the PI control parameters that gives
this acceptable performance is partially trial and error. We arrived
3
at the critical integral gain of 8.9 x 10- and cut it in half before try-
ing it. Had we done the critical analysis with proportional-only we
would have found a critical proportional control gain of approxi-
mately 0.8. Halving that parameter and using it with the above
conservative integral control gain would have given performance
with too little damping and we could have made adjustments from
that point. So, the Bode analysis can give approximate starting
points.
Closed-Loop Performance In the Frequency Domain
Figure 5-12 shows the Bode plot for the closed-loop system under
integral-only control (shown in Fig. 5-10). Here the magnitude and
phase of
y GcGp
S- 1+GcGp