
Page 183 - Practical Control Engineering a Guide for Engineers, Managers, and Practitioners
P. 183
158 Chapter Six
2.5 r---~----r--~---r----r-----r-----,~----,
0
2 0, ••••• , 0 •••• • , ••••• ' • ••• 0 0 ••• 0 .... 9 ....
·1 o Closed-loop roots PI t · · · · · ·. ·
0
0
0
0
1.5
. v Closed-loop roots PID . : . . ...... .
1
.
0.5 ••• • . • •• 0 ·'· •••• : • ••••• ••••
•
:
v.
··0·
-.;r
-0.5
0
-1 0 ~ • • • • • : • • • • 0 0 •• • 0 • • • • • ••
-1.5 •••• : . •••• 0 : . 0 0 • 0 0 : . •
-2 ···'···· 6'
2 :
- :?14 -12 -10 -8 -6 -4 -2 0 2
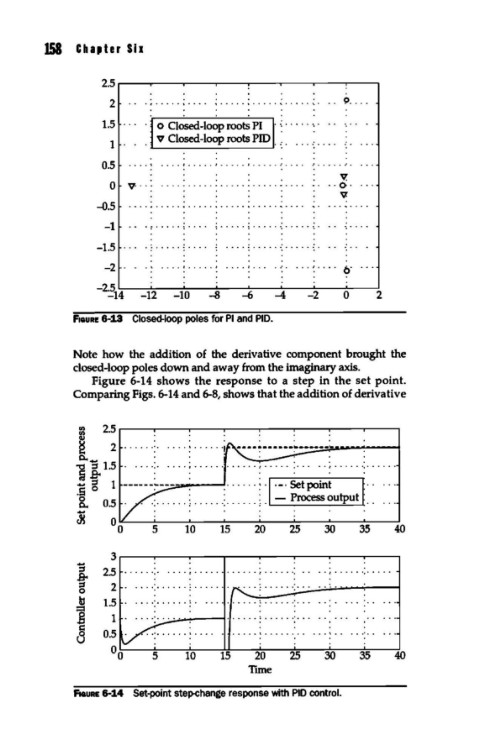
fiGURE 6-:1.3 Closed-loop poles for PI and PID.
Note how the addition of the derivative component brought the
closed-loop poles down and away from the imaginary axis.
Figure 6-14 shows the response to a step in the set point.
Comparing Figs. 6-14 and 6-8, shows that the addition of derivative
:g 2.5 r---"""T""---r-----r---..-----r--.,....-----r------,
~ 2 ...... •.
a.. ....
~ = 1.5
~ t 1
.s
&. 0.5
5 10 15 20 25 30 35 40
3r---"""T""---r-----r---..-----r--.,....-----r------,
. . . .
2.5 ..... ·.· •••• : • ••••• 0 •• 0. ·: ••••• •• • ·: ••• 0 ••••••••
2
1.5 ..... 0 ••••••••••••••••••••••••••
1 ............... .
0.5
10 15 20 25 30 35 40
Tune
fiGURE 6-14 Set-point step-change response with PID control.