
Page 187 - Practical Control Engineering a Guide for Engineers, Managers, and Practitioners
P. 187
1&2 Cll111ter Sll
l 2.5 ....... ........ ........
2
1.5
1i 1
ig 0.5
0
~ -0.50
10 20 30 40 50 60
......
2 . . . .
.
.
.
.
.
.
.
.
.
.
.
.
1.5 ·· ·] ····· ·l·······r······-r········r·······-r·· ····
1
. : ~ ~ ~ ~ ~;
0 .5 .. ··~ ·······!·········:·········~··· .. ··!········~·········!·········:·········!········
.
.
.
.
.
.
20 30 40 50 90 100
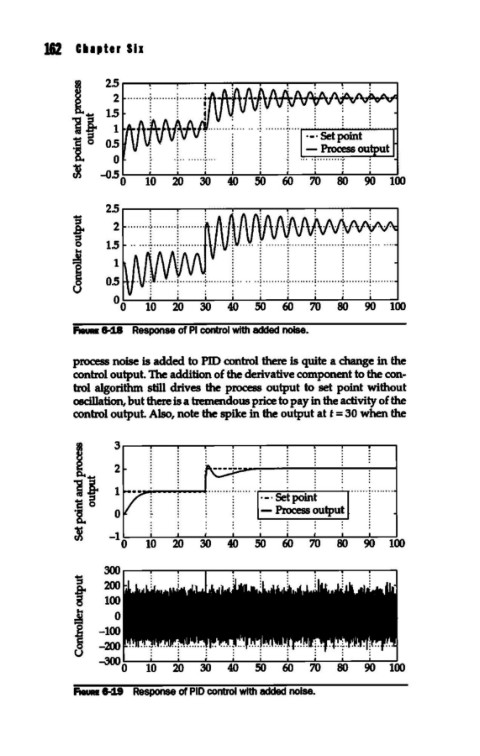
,__ 8-1.8 Response of PI control with added noise.
process noise is added to PID control there is quite a change in the
control output. The addition of the derivative component to the con-
trol algorithm still drives the process output to set point without
oscillation, but there is a tremendous price to pay in the activity of the
control output Also, note the spike in the output at t = 30 when the
I 3
2
1i 1
c:8
.R. 0
~
300
'$ 200
t 100
Ji 0
-100
i -200
u
Aa .. 8-2.9 Response of PID control with added noise.