
Page 342 - Automotive Engineering Powertrain Chassis System and Vehicle Body
P. 342
Tyre characteristics and vehicle handling and stability C HAPTER 11.1
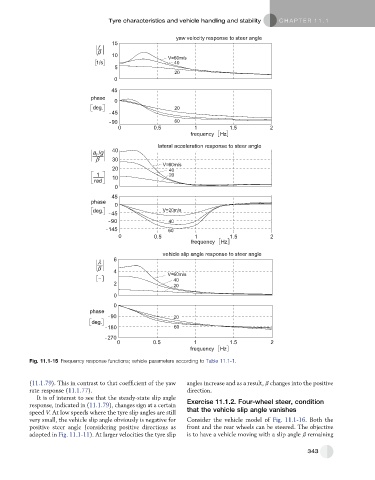
Fig. 11.1-15 Frequency response functions; vehicle parameters according to Table 11.1-1.
(11.1.79). This in contrast to that coefficient of the yaw angles increase and as a result, b changes into the positive
rate response (11.1.77). direction.
It is of interest to see that the steady-state slip angle
response, indicated in (11.1.79), changes sign at a certain Exercise 11.1.2. Four-wheel steer, condition
speed V. At low speeds where the tyre slip angles are still that the vehicle slip angle vanishes
very small, the vehicle slip angle obviously is negative for Consider the vehicle model of Fig. 11.1-16. Both the
positive steer angle (considering positive directions as front and the rear wheels can be steered. The objective
adopted in Fig. 11.1-11). At larger velocities the tyre slip is to have a vehicle moving with a slip angle b remaining
343