
Page 385 - DSP Integrated Circuits
P. 385
370 Chapters DSP Architectures
Timing and synchronization problems are alleviated in this approach due to
the inherent decomposition of the system into independent isochronous parts. The
clock skew problem is changed into a communication problem between isochro-
nous zones. We will use this technique of handshaking in the three case studies to
interface the fast bit-serial processing elements with the main memories.
8.5 MULTIPROCESSORS AND MULTICOMPUTERS
General-purpose parallel or distributed computer systems can be divided into two
categories: multiprocessors and multicomputers [9]. The main difference between
these two categories lies in the way in which communication between the proces-
sors is organized.
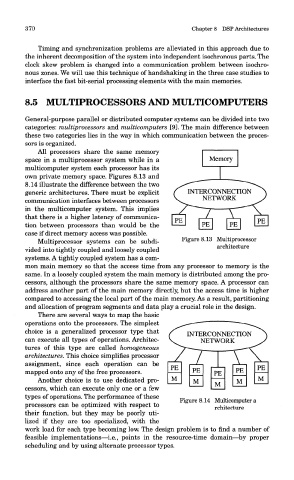
All processors share the same memory
space in a multiprocessor system while in a
multicomputer system each processor has its
own private memory space. Figures 8.13 and
8.14 illustrate the difference between the two
generic architectures. There must be explicit
communication interfaces between processors
in the multicomputer system. This implies
that there is a higher latency of communica-
tion between processors than would be the
case if direct memory access was possible.
Figure 8.13 Multiprocessor
Multiprocessor systems can be subdi-
architecture
vided into tightly coupled and loosely coupled
systems. A tightly coupled system has a com-
mon main memory so mat tne access time irom any processor to memory is tne
same. In a loosely coupled system the main memory is distributed among the pro-
cessors, although the processors share the same memory space. A processor can
address another part of the main memory directly, but the access time is higher
compared to accessing the local part of the main memory. As a result, partitioning
and allocation of program segments and data play a crucial role in the design.
mere are several ways to map me oasic
operations onto the processors. The simplest
choice is a generalized processor type that
can execute all types of operations. Architec-
tures of this type are called homogeneous
architectures. This choice simplifies processor
assignment, since each operation can be
mapped onto any of the free processors.
Another choice is to use dedicated pro-
cessors, which can execute only one or a few
types of operations. The performance of these
Figure 8.14 Multicomputer a
processors can be optimized with respect to rchitecture
their function, but they may be poorly uti-
lized if they are too specialized, with the
work load for each type becoming low. The design problem is to find a number of
feasible implementations—i.e., points in the resource-time domain—by proper
scheduling and by using alternate processor types.