
Page 582 - Dynamics of Mechanical Systems
P. 582
0593_C16_fm Page 563 Tuesday, May 7, 2002 7:06 AM
Mechanical Components: Cams 563
16.13 Cycloidal Rise Function
In an attempt to avoid sudden changes in a cam–follower pair, many designers have used
a cycloidal follower rise profile. The cycloidal profile, while producing slightly higher
accelerations than the sinusoidal profile, has the advantage of very gradual changes of
the transition points, thus reducing sudden changes in the forces.
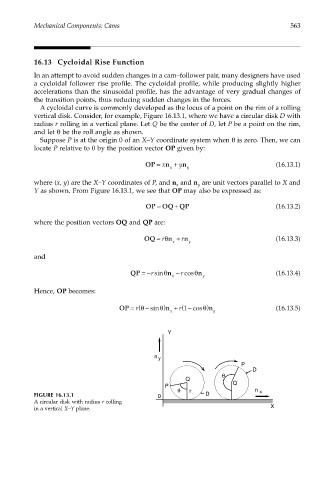
A cycloidal curve is commonly developed as the locus of a point on the rim of a rolling
vertical disk. Consider, for example, Figure 16.13.1, where we have a circular disk D with
radius r rolling in a vertical plane. Let Q be the center of D, let P be a point on the rim,
and let θ be the roll angle as shown.
Suppose P is at the origin 0 of an X–Y coordinate system when θ is zero. Then, we can
locate P relative to 0 by the position vector OP given by:
OP = x n + y n (16.13.1)
x y
where (x, y) are the X–Y coordinates of P, and n and n are unit vectors parallel to X and
x y
Y as shown. From Figure 16.13.1, we see that OP may also be expressed as:
=
+
OP OQ QP (16.13.2)
where the position vectors OQ and QP are:
OQ = rθ n + r n (16.13.3)
x y
and
QP =−rsinθ n − rcosθ n (16.13.4)
x y
Hence, OP becomes:
−
OP = ( r θ sin n ) θ + ( r 1 − cos n ) θ (16.13.5)
x y
Y
n y
P
D
θ
Q
Q
P
θ r n x
FIGURE 16.13.1 0 D
A circular disk with radius r rolling
in a vertical X–Y plane. X