
Page 569 - Engineering Digital Design
P. 569
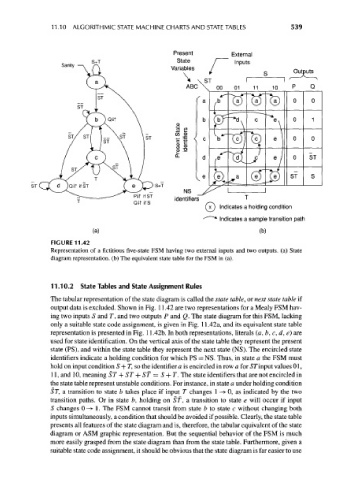
11.10 ALGORITHMIC STATE MACHINE CHARTS AND STATE TABLES 539
Present External
s+T State / | np uts
Sanity
^ Variables
\ ST I
ABC \ 00 01 11
ST
S+T
NS
identifiers
(x ) Indicates a holding condition
" * Indicates a sample transition path
(a) (b)
FIGURE 11.42
Representation of a fictitious five-state FSM having two external inputs and two outputs, (a) State
diagram representation, (b) The equivalent state table for the FSM in (a).
11.10.2 State Tables and State Assignment Rules
The tabular representation of the state diagram is called the state table, or next state table if
output data is excluded. Shown in Fig. 11.42 are two representations for a Mealy FSM hav-
ing two inputs S and T, and two outputs P and Q. The state diagram for this FSM, lacking
only a suitable state code assignment, is given in Fig. 11.42a, and its equivalent state table
representation is presented in Fig. 11.42b. In both representations, literals (a, b, c, d, e} are
used for state identification. On the vertical axis of the state table they represent the present
state (PS), and within the state table they represent the next state (NS). The encircled state
identifiers indicate a holding condition for which PS = NS. Thus, in state a the FSM must
hold on input condition S + T, so the identifier a is encircled in row a for ST input values 01,
11, and 10, meaning ST + ST + ST = S + T. The state identifiers that are not encircled in
the state table represent unstable conditions. For instance, in state a under holding condition
ST, a transition to state b takes place if input T changes 1 —> 0, as indicated by the two
transition paths. Or in state b, holding on ST, a transition to state e will occur if input
S changes 0 —»• 1. The FSM cannot transit from state b to state c without changing both
inputs simultaneously, a condition that should be avoided if possible. Clearly, the state table
presents all features of the state diagram and is, therefore, the tabular equivalent of the state
diagram or ASM graphic representation. But the sequential behavior of the FSM is much
more easily grasped from the state diagram than from the state table. Furthermore, given a
suitable state code assignment, it should be obvious that the state diagram is far easier to use