
Page 84 - Finite Element Modeling and Simulations with ANSYS Workbench
P. 84
Beams and Frames 69
FIGURE 3.6
Common beam cross-section profiles.
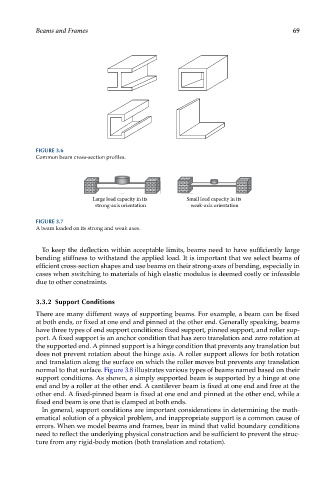
Large load capacity in its Small load capacity in its
strong-axis orientation weak-axis orientation
FIGURE 3.7
A beam loaded on its strong and weak axes.
To keep the deflection within acceptable limits, beams need to have sufficiently large
bending stiffness to withstand the applied load. It is important that we select beams of
efficient cross-section shapes and use beams on their strong-axes of bending, especially in
cases when switching to materials of high elastic modulus is deemed costly or infeasible
due to other constraints.
3.3.2 Support Conditions
There are many different ways of supporting beams. For example, a beam can be fixed
at both ends, or fixed at one end and pinned at the other end. Generally speaking, beams
have three types of end support conditions: fixed support, pinned support, and roller sup-
port. A fixed support is an anchor condition that has zero translation and zero rotation at
the supported end. A pinned support is a hinge condition that prevents any translation but
does not prevent rotation about the hinge axis. A roller support allows for both rotation
and translation along the surface on which the roller moves but prevents any translation
normal to that surface. Figure 3.8 illustrates various types of beams named based on their
support conditions. As shown, a simply supported beam is supported by a hinge at one
end and by a roller at the other end. A cantilever beam is fixed at one end and free at the
other end. A fixed-pinned beam is fixed at one end and pinned at the other end, while a
fixed end beam is one that is clamped at both ends.
In general, support conditions are important considerations in determining the math-
ematical solution of a physical problem, and inappropriate support is a common cause of
errors. When we model beams and frames, bear in mind that valid boundary conditions
need to reflect the underlying physical construction and be sufficient to prevent the struc-
ture from any rigid-body motion (both translation and rotation).