
Page 169 - Industrial Power Engineering and Applications Handbook
P. 169
Static controls and braking of motors a149
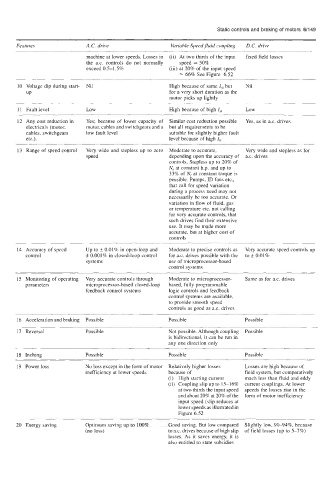
Features A.C. drive Variable-Speed fluid coupling D.C. drive
machine at lower speeds. Losses in (ii) At two thirds of the input fixed field losses
the a.c. controls do not normally speed 50%
exceed 0.5-1.5% (iii) at 20% of the input speed
= 66% See Figure 6.52
IO Voltage dip during start- Nil High because of same Zst but Nil
UP for a very short duration as the
motor picks up lightly
11 Fault level LOW High because of high Zst LOW
12 Any cost reduction in Yes; because of lower capacity of Similar cost reduction possible Yes, as in a.c. drives.
electricals (motor, motor, cables and switchgears and a but all requirements to be
cables, switchgears low fault level suitable for slightly higher fault
etc.). level because of high Z,,
.~
13 Range of speed control Very wide and stepless up to zero Moderate to accurate, Very wide and stepless as for
sped depending upon the accuracy of a.c. drives
controls. Stepless up to 20% of
N, at constant h.p. and up to
33% of N, at constant torque is
possible. Pumps, ID fans etc.,
that call for speed variation
during a process need may not
necessarily be too accurate. Or
variation in flow of fluid, gas
or temperature etc. not calling
for very accurate controls, that
such drives find their extensive
use. It may be made more
accurate, but at higher cost of
controls
14 Accuracy of speed Up to & 0.01 % in open-loop and Moderate to precise controls as Very accurate speed controls up
control f 0.001% in closed-loop control for ax. drives possible with the to k 0.01%
systems use of microprocessor-based
control systems
15 Monitoring of operating Very accurate controls through Moderate to microprocessor- Same as for a.c. drives
parameters microprocessor-based closed-loop based, fully programmable
feedback control systems logic controls and feedback
control systems are available,
to provide smooth speed
controls as good as a.c. drives
16 Acceleration and braking Possible Possible Possible
17 Reversal Possible Not possible. Although coupling Possible
is bidirectional, it can be run in
any one direction only
18 Inching Possible Possible Possible
19 Power loss No loss except in the form of motor Relatively higher losses Losses are high because of
inefficiency at lower speeds because of field system, but comparatively
(i) High starting current much less than fluid and eddy
(ii) Coupling slip up to 15-16% current couplings. At lower
at two thirds the input speed speeds the losses rise in the
and about 20% at 20% of the form of motor inefficiency
input speed (slip reduces at
lower speeds as illustrated in
Figure 6.52
20 Energy saving Optimum saving up to 100% Good saving. But low compared Slightly low, 90-94%. because
(no loss) to a.c. drives because of high slip of field losses (up to 5-776)
losses. As it saves energy, it is
also entitled to state suhsidies