
Page 215 - Innovations in Intelligent Machines
P. 215
208 S. Pr¨uter et al.
4 V1
3 2 V2
V3
Angular drift ∆j −1 1 0
V4
−2
−3
−4
0 18 36 54 72 90 108 126 144 162 180 198 216 234 252 270 288 306 324 342 0
Angle j
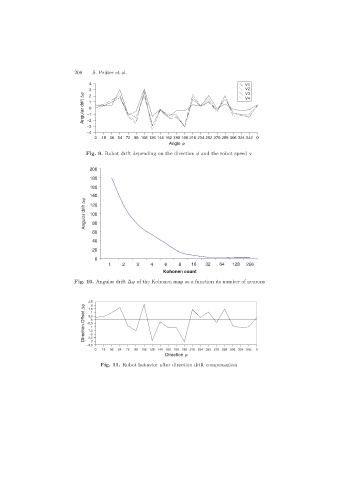
Fig. 9. Robot drift depending on the direction φ and the robot speed v
200
180
160
140
Angular drift ∆j 120
100
80
60
40
20
0
1 2 3 4 6 8 16 32 64 128 256
Kohonen count
Fig. 10. Angular drift ∆ϕ of the Kohonen map as a function its number of neurons
2,5 2
Direction Offset ∆j −0,5 1 0
1,5
0,5
−1
−1,5
−2
−2,5
−3
−3,5
0 18 36 54 72 90 108 126 144 162 180 198 216 234 252 270 288 306 324 342 0
Direction j
Fig. 11. Robot behavior after direction drift compensation