
Page 155 - Mechanics of Microelectromechanical Systems
P. 155
142 Chapter 3
The ratio of the x-axis stiffnesses becomes:
and for and this ratio is almost
constant with a 2.5 approximate value.
2.3 U-Springs
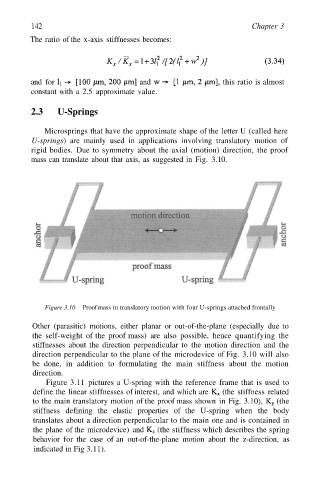
Microsprings that have the approximate shape of the letter U (called here
U-springs) are mainly used in applications involving translatory motion of
rigid bodies. Due to symmetry about the axial (motion) direction, the proof
mass can translate about that axis, as suggested in Fig. 3.10.
Figure 3.10 Proof mass in translatory motion with four U-springs attached frontally
Other (parasitic) motions, either planar or out-of-the-plane (especially due to
the self-weight of the proof mass) are also possible, hence quantifying the
stiffnesses about the direction perpendicular to the motion direction and the
direction perpendicular to the plane of the microdevice of Fig. 3.10 will also
be done, in addition to formulating the main stiffness about the motion
direction.
Figure 3.11 pictures a U-spring with the reference frame that is used to
define the linear stiffnesses of interest, and which are (the stiffness related
to the main translatory motion of the proof mass shown in Fig. 3.10), (the
stiffness defining the elastic properties of the U-spring when the body
translates about a direction perpendicular to the main one and is contained in
the plane of the microdevice) and (the stiffness which describes the spring
behavior for the case of an out-of-the-plane motion about the z-direction, as
indicated in Fig 3.11).