
Page 413 - Microsensors, MEMS and Smart Devices - Gardner Varadhan and Awadelkarim
P. 413
APPLICATIONS 393
Figure 13.30 Typical half-wavelength equivalent circuit using HP EESOF
70 75 80 85
Frequency (MHz)
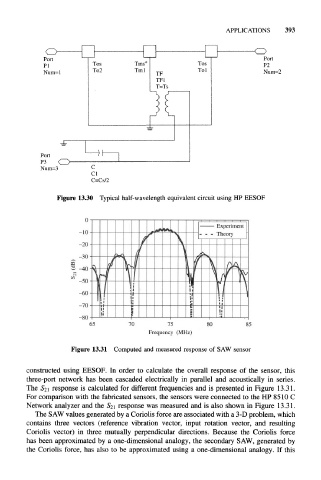
Figure 13.31 Computed and measured response of SAW sensor
constructed using EESOF. In order to calculate the overall response of the sensor, this
three-port network has been cascaded electrically in parallel and acoustically in series.
The S 21 response is calculated for different frequencies and is presented in Figure 13.31.
For comparison with the fabricated sensors, the sensors were connected to the HP 8510 C
Network analyzer and the S 21 response was measured and is also shown in Figure 13.31.
The SAW values generated by a Coriolis force are associated with a 3-D problem, which
contains three vectors (reference vibration vector, input rotation vector, and resulting
Coriolis vector) in three mutually perpendicular directions. Because the Coriolis force
has been approximated by a one-dimensional analogy, the secondary SAW, generated by
the Coriolis force, has also to be approximated using a one-dimensional analogy. If this