
Page 102 - Modern Control Systems
P. 102
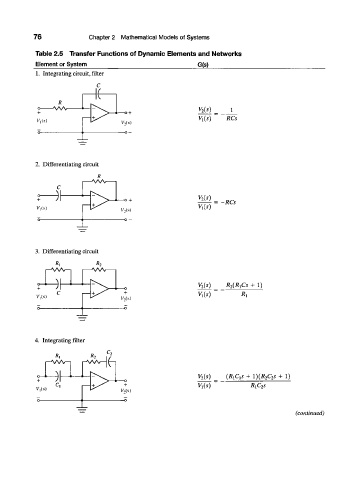
76 Chapter 2 Mathematical Models of Systems
Table 2.5 Transfer Functions of Dynamic Elements and Networks
Element or System G(g)
1. Integrating circuit, filter
C
•If
R
1
+ * o +
Vi(') RCs
V-ts)
2. Differentiating circuit
+ — ) ^ -o + Vi(s) = -RCs
V,(s) V,(s)
o
3. Differentiating circuit
9r =
o—» l/ 2(5) R 2(RiCs + 1)
+ V,(*) *,
V',(s)
IMs)
o
4. Integrating filter
C,
|-VW-|(-n
rHr y 2(5) (/JiC,* + i)(/? 2 Q* + )
l
+ W RiC 2s
V,(s)
V ?(s)