
Page 105 - Modern Control Systems
P. 105
Section 2.6 Block Diagram Models
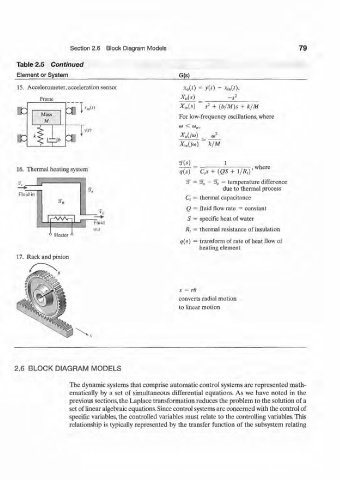
Table 2.5 Continued
Element or System G(s)
15. Accelerometer, acceleration sensor *o(0 = y{t) - x m{t),
Frame X 0(s) -s*
Xin(s) s 2 + (b/M)s + k/M
For low-frequency oscillations, where
ai < &J„,
X 0{j(o) or
X ia(j<o) k/M
^ 1 ,
16. Thermal heating system — where
q(s) C,s + (QS + \/R,Y
2T = % ~ % = temperature difference
due to thermal process
Fluid ill
C, = thermal capacitance
Q = fluid flow rate = constant
S = specific heat of water
Fluid
out R, = thermal resistance of insulation
° Heater
q(s) = transform of rate of heat flow of
heating element
17. Rack and pinion
x = rd
converts radial motion
to linear motion
2.6 BLOCK DIAGRAM MODELS
The dynamic systems that comprise automatic control systems are represented math-
ematically by a set of simultaneous differential equations. As we have noted in the
previous sections, the Laplace transformation reduces the problem to the solution of a
set of linear algebraic equations. Since control systems are concerned with the control of
specific variables, the controlled variables must relate to the controlling variables. This
relationship is typically represented by the transfer function of the subsystem relating