
Page 110 - Modern Control Systems
P. 110
84 Chapter 2 Mathematical Models of Systems
H 2
[ G 4
\r —* G x +A G 2 G 3 • *• n.v)
V G 4
-v <— i
•
Hx
* 3 <—
(a)
»• Y(s)
(b)
R(s) Y{s)
R > 0 - ^ G G 2G,G 4 Y(s) G\<h<hP*
-
1 — GT IGHH\ +G2G3//2 \— GJ IG^HI^-G2GT IH2'^'G^G2G2 IG 4HT I
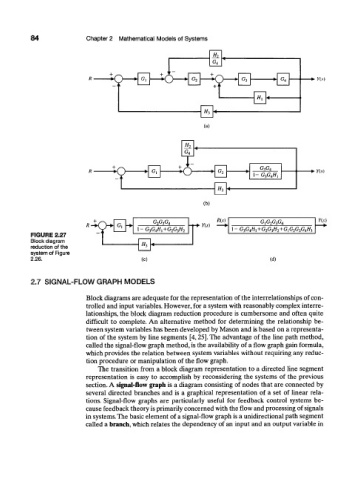
FIGURE 2.27
Block diagram
reduction of the H,
system of Figure
2.26. (c) (d)
2.7 SIGNAL-FLOW GRAPH MODELS
Block diagrams are adequate for the representation of the interrelationships of con-
trolled and input variables. However, for a system with reasonably complex interre-
lationships, the block diagram reduction procedure is cumbersome and often quite
difficult to complete. An alternative method for determining the relationship be-
tween system variables has been developed by Mason and is based on a representa-
tion of the system by line segments [4,25]. The advantage of the line path method,
called the signal-flow graph method, is the availability of a flow graph gain formula,
which provides the relation between system variables without requiring any reduc-
tion procedure or manipulation of the flow graph.
The transition from a block diagram representation to a directed line segment
representation is easy to accomplish by reconsidering the systems of the previous
section. A signal-flow graph is a diagram consisting of nodes that are connected by
several directed branches and is a graphical representation of a set of linear rela-
tions. Signal-flow graphs are particularly useful for feedback control systems be-
cause feedback theory is primarily concerned with the flow and processing of signals
in systems. The basic element of a signal-flow graph is a unidirectional path segment
called a branch, which relates the dependency of an input and an output variable in