
Page 283 - Modern Control of DC-Based Power Systems
P. 283
242 Modern Control of DC-Based Power Systems
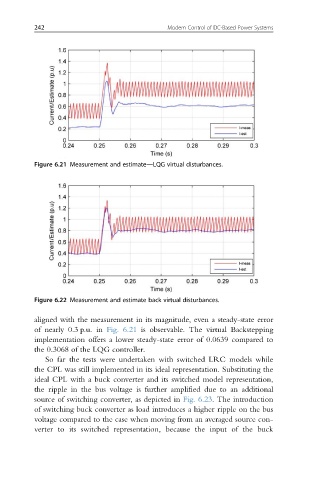
Figure 6.21 Measurement and estimate—LQG virtual disturbances.
Figure 6.22 Measurement and estimate back virtual disturbances.
aligned with the measurement in its magnitude, even a steady-state error
of nearly 0.3 p.u. in Fig. 6.21 is observable. The virtual Backstepping
implementation offers a lower steady-state error of 0.0639 compared to
the 0.3068 of the LQG controller.
So far the tests were undertaken with switched LRC models while
the CPL was still implemented in its ideal representation. Substituting the
ideal CPL with a buck converter and its switched model representation,
the ripple in the bus voltage is further amplified due to an additional
source of switching converter, as depicted in Fig. 6.23. The introduction
of switching buck converter as load introduces a higher ripple on the bus
voltage compared to the case when moving from an averaged source con-
verter to its switched representation, because the input of the buck