
Page 178 - Robot Builders Source Book - Gordon McComb
P. 178
166 Kinematics and Control of Automatic Machines
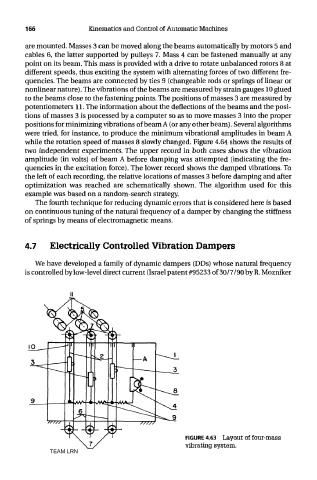
are mounted. Masses 3 can be moved along the beams automatically by motors 5 and
cables 6, the latter supported by pulleys 7. Mass 4 can be fastened manually at any
point on its beam. This mass is provided with a drive to rotate unbalanced rotors 8 at
different speeds, thus exciting the system with alternating forces of two different fre-
quencies. The beams are connected by ties 9 (changeable rods or springs of linear or
nonlinear nature). The vibrations of the beams are measured by strain gauges 10 glued
to the beams close to the fastening points. The positions of masses 3 are measured by
potentiometers 11. The information about the deflections of the beams and the posi-
tions of masses 3 is processed by a computer so as to move masses 3 into the proper
positions for minimizing vibrations of beam A (or any other beam). Several algorithms
were tried, for instance, to produce the minimum vibrational amplitudes in beam A
while the rotation speed of masses 8 slowly changed. Figure 4.64 shows the results of
two independent experiments. The upper record in both cases shows the vibration
amplitude (in volts) of beam A before damping was attempted (indicating the fre-
quencies in the excitation force). The lower record shows the damped vibrations. To
the left of each recording, the relative locations of masses 3 before damping and after
optimization was reached are schematically shown. The algorithm used for this
example was based on a random-search strategy.
The fourth technique for reducing dynamic errors that is considered here is based
on continuous tuning of the natural frequency of a damper by changing the stiffness
of springs by means of electromagnetic means.
4.7 Electrically Controlled Vibration Dampers
We have developed a family of dynamic dampers (DDs) whose natural frequency
is controlled by low-level direct current (Israel patent #95233 of 30/7/90 by R. Mozniker
FIGURE 4.63 Layout of four-mass
vibrating system.
TEAM LRN