
Page 180 - Robot Builders Source Book - Gordon McComb
P. 180
168 Kinematics and Control of Automatic Machines
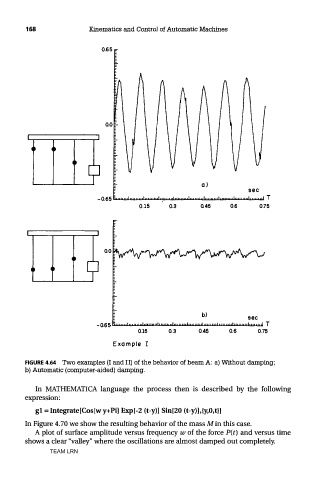
FIGURE 4.64 Two examples (I and II) of the behavior of beam A: a) Without damping;
b) Automatic (computer-aided) damping.
In MATHEMATICA language the process then is described by the following
expression:
gl = Integrate[Cos[wy+Pi] Exp[-2 (t-y)] Sin[20 (t-y)],{y,0,t}]
In Figure 4.70 we show the resulting behavior of the mass M in this case.
A plot of surface amplitude versus frequency w of the force P(t) and versus time
shows a clear "valley" where the oscillations are almost damped out completely.
TEAM LRN